Podstawy czujników zbliżeniowych: dobór i stosowanie w automatyce przemysłowej
Przekazane przez: Północnoamerykańscy redaktorzy DigiKey
2021-04-21
Wiele zastosowań automatyki przemysłowej (IA) wymaga wykrywania obecności i/lub położenia przedmiotu lub osoby bez fizycznego kontaktu, aby uniknąć ograniczania lub uniemożliwiania ruchów wykrywanego obiektu. Czujniki zbliżeniowe idealnie spełniają tę rolę. Jednak istnieją różne rodzaje czujników zbliżeniowych: magnetyczne, pojemnościowe, indukcyjne i optyczne, a skład materiałowy wykrywanego obiektu może wpływać na zdolność czujnika do wykrywania jego obecności.
Niektóre czujniki zbliżeniowe są użyteczne przy wykrywaniu metali żelaznych, inne mogą wykrywać dowolny rodzaj metalu, podczas gdy jeszcze inne wykrywają dowolny rodzaj obiektu, a nawet osoby. Potencjalni użytkownicy czujników zbliżeniowych w automatyce przemysłowej (IA) muszą zdawać sobie sprawę z różnych rodzajów technologii zastosowanych w czujnikach zbliżeniowych i możliwości użycia w konkretnych sytuacjach.
Artykuł omawia kilka rodzajów czujników i wyszczególnia wykrywane przez nie obiekty oraz omawia czułość przestrzenną poszczególnych rodzajów urządzeń. Jako przykładowe wykorzystano urządzenia firm Texas Instruments, Red Lion Controls, Littelfuse Inc., Omron Electronics Inc., MaxBotix Inc. oraz Carlo Gavazzi Inc.
Indukcyjne czujniki zbliżeniowe
Indukcyjne czujniki zbliżeniowe wykrywają obecność przedmiotów przewodzących (metalowych), a ich zasięg wykrywania jest uzależniony od rodzaju wykrywanego metalu. Czujniki te działają dzięki wykorzystaniu pola magnetycznego wysokiej częstotliwości generowanego przez cewkę w obwodzie oscylacyjnym. W przewodzącym obiekcie docelowym, który zbliża się do pola magnetycznego wzbudzane są prądy indukcyjne, czyli wirowe. Tworzą one przeciwne pole magnetyczne, które skutecznie zmniejsza indukcyjność czujnika.
Indukcyjne czujniki zbliżeniowe działają z wykorzystaniem dwóch metod. W pierwszej metodzie działania, obiekt docelowy zbliżający się do czujnika powoduje zwiększenie przepływającego prądu indukcyjnego, co zwiększa obciążenie obwodu oscylacyjnego, a w konsekwencji tłumienie lub wygaszenie jego drgań. Czujnik wykrywa tę zmianę mierząc zmianę oscylacji przy użyciu obwodu detekcji amplitudy i podaje na wyjście sygnał wykrycia.
Alternatywny schemat działania zamiast amplitudy wykorzystuje zmianę częstotliwości oscylacji, spowodowaną obecnością przewodzącego obiektu docelowego. Obiekty docelowe z metali nieżelaznych, np. aluminium lub miedź, zbliżające się do czujnika powodują wzrost częstotliwości oscylacji, natomiast obiekty z metali żelaznych, np. żelaza lub stali, powodują spadek częstotliwości oscylacji. Zmiana częstotliwości oscylacji w stosunku do częstotliwości referencyjnej powoduje zmianę stanu na wyjściu czujnika.
Urządzenie LDC0851HDSGT firmy Texas Instruments jest przykładowym przełącznikowym indukcyjnym czujnikiem zbliżeniowym, który wykorzystuje zmienność częstotliwości do wykrywania obiektów metalowych w swoim polu elektromagnetycznym (ilustracja 1).
") Ilustracja 1: indukcyjny czujnik zbliżeniowy LDC0851HDSGT wykorzystuje dwie cewki - cewkę pomiarową i cewkę referencyjną - do pomiaru różnicy indukcyjności spowodowanej zbliżeniem obiektu docelowego do cewki pomiarowej. (Źródło ilustracji: Texas Instruments)
Ilustracja 1: indukcyjny czujnik zbliżeniowy LDC0851HDSGT wykorzystuje dwie cewki - cewkę pomiarową i cewkę referencyjną - do pomiaru różnicy indukcyjności spowodowanej zbliżeniem obiektu docelowego do cewki pomiarowej. (Źródło ilustracji: Texas Instruments)
Indukcyjny łącznik zbliżeniowy LDC0851 idealnie nadaje się do bezkontaktowego wykrywania zbliżenia w takich zastosowaniach, jak wykrywanie obecności, zliczanie zdarzeń oraz proste przyciski, gdzie zakres wykrywania jest mniejszy od 10mm (0,39”). Urządzenie zmienia stan na wyjściu, gdy przewodzący obiekt zbliży się do cewki pomiarowej. Konfiguracja różnicowa (użycie cewki czujnikowej i cewki referencyjnej do określenia względnej indukcyjności układu) oraz histereza gwarantują niezawodne przełączanie, odporne na drgania mechaniczne, zmiany temperatury i wpływ wilgotności.
Indukcyjne cewki wykrywające urządzenia LDC0851HDSGT są strojone przy użyciu pojedynczego kondensatora czujnika, który ustala częstotliwość oscylacji w zakresie od 3 do 19MHz. Wyjście komplementarne znajduje się w stanie niskim, gdy indukcyjność czujnikowa jest niższa od indukcyjności referencyjnej i powraca do stanu wysokiego, gdy jest odwrotnie.
Magnetyczne czujniki zbliżeniowe
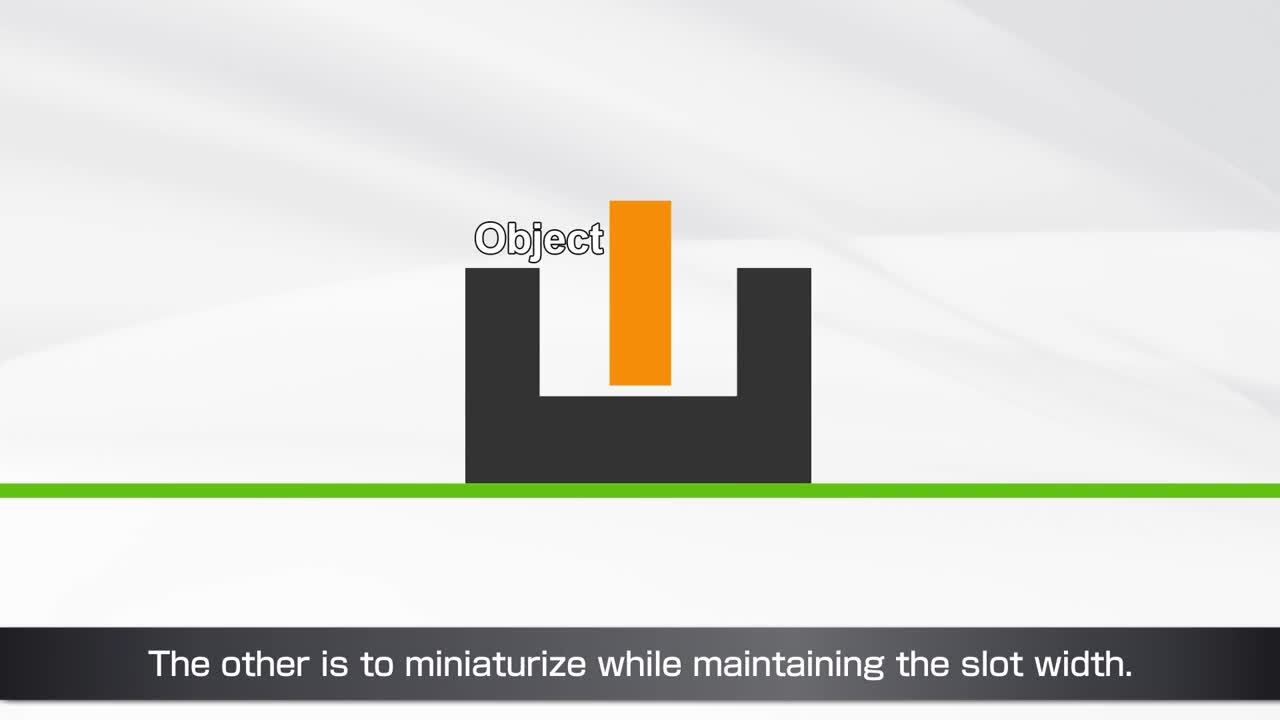
Służące do pomiaru położenia i prędkości ruchomych komponentów metalowych magnetyczne detektory zbliżeniowe mogą być urządzeniami aktywnymi, jak np. czujnik hallotronowy, bądź urządzeniami pasywnymi, np. czujnik ze zmienną reluktancją (VR), taki jak gwintowany detektor magnetyczny MP62TA00 firmy Red Lion Controls (ilustracja 2, po lewej). Czujnik zbliżeniowy ze zmienną reluktancją (VR) mierzy zmiany reluktancji magnetycznej, która stanowi odpowiednik oporu elektrycznego w obwodzie elektrycznym. Składa się z magnesu trwałego, trzpienia biegunowego i cewki pomiarowej zamkniętej w cylindrycznym korpusie.
 Ilustracja 2: detektor magnetyczny ze zmienną reluktancją (VR) (po lewej) jest czujnikiem pasywnym, który wykrywa zmianę pola magnetycznego pomiędzy trzpieniem biegunowym i obudową czujnika (po prawej). (Źródła ilustracji: Art Pini, dla obrazu MP62TA00 firmy Red Lion Controls)
Ilustracja 2: detektor magnetyczny ze zmienną reluktancją (VR) (po lewej) jest czujnikiem pasywnym, który wykrywa zmianę pola magnetycznego pomiędzy trzpieniem biegunowym i obudową czujnika (po prawej). (Źródła ilustracji: Art Pini, dla obrazu MP62TA00 firmy Red Lion Controls)
Obiekt ferromagnetyczny przemieszczający się w pobliżu trzpienia biegunowego powoduje zmiany pola magnetycznego. Zmiany te generują z kolei napięcie sygnałowe w cewce sygnałowej. Wielkość napięcia sygnałowego uzależniona jest od rozmiaru obiektu docelowego, jego prędkości oraz odległości pomiędzy trzpieniem biegunowym i obiektem. Obiekt musi poruszać się, aby czujnik ze zmienną reluktancją (VRS) mógł go wykryć. Gwintowany detektor magnetyczny MP62TA00 jest zamkniętym w żywicy czujnikiem zbliżeniowym ze zmienną reluktancją (VR) o zakresie temperatur roboczych od -40 do +107°C. Ma on długość 25,4mm (1”) ) i korpus z gwintem ¼ - 40UNS.
Czujniki ze zmienną reluktancją (VR) są urządzeniami pasywnymi, dlatego nie wymagają źródła zasilania. Z tego względu znajdują one zwykle zastosowanie w pomiarach w maszynach wirujących. Przykład: detektory ze zmienną reluktancją (VR) typu MP62TA00 są szeroko stosowane do wykrywania poruszających się kół zębatych, zębatek oraz kół pasów rozrządu wykonanych z metali żelaznych. Mogą one służyć do wykrywania łbów śrub, klinów i innych szybko poruszających się metalowych obiektów docelowych (ilustracja 3).
") Ilustracja 3: czujniki ze zmienną reluktancją (VR) są szeroko stosowane do wykrywania zębów kół, krzywek i rowków w maszynach wirujących. (Źródło ilustracji: Red Lion Controls)
Ilustracja 3: czujniki ze zmienną reluktancją (VR) są szeroko stosowane do wykrywania zębów kół, krzywek i rowków w maszynach wirujących. (Źródło ilustracji: Red Lion Controls)
Są one wykorzystywane jako tachometry do pomiaru prędkości obrotowej a także stosowane parami do pomiaru mimośrodowości wałów obrotowych.
Drugi rodzaj czujników magnetycznych do wykrywania pola magnetycznego wykorzystuje zjawisko Halla. Efekt Halla opisuje interakcję przewodnika z prądem oraz pola magnetycznego prostopadłego do płaszczyzny przewodnika. Gdy przewodnik z prądem zostanie umieszczony w polu magnetycznym, zostanie wygenerowane napięcie (napięcie Halla) w kierunku prostopadłym do prądu i do pola. Napięcie Halla jest proporcjonalne do gęstości strumienia pola magnetycznego i wymaga stosowania namagnesowanego obiektu docelowego.
Czujnik hallotronowy 55100-3H-02-A firmy Littelfuse Inc. posiada montaż kołnierzowy i wyjście cyfrowe lub programowane analogowe wyjście napięciowe (ilustracja 4).
 Ilustracja 4: schemat blokowy i zdjęcie hallotronowego czujnika zbliżeniowego 55100-3H-02-A z montażem kołnierzowym i wyjściem napięciowym. (Źródło ilustracji: Littelfuse Inc.)
Ilustracja 4: schemat blokowy i zdjęcie hallotronowego czujnika zbliżeniowego 55100-3H-02-A z montażem kołnierzowym i wyjściem napięciowym. (Źródło ilustracji: Littelfuse Inc.)
Urządzenie 55100-3H-02-A ma wymiary 25,5 x 11 x 3mm i jest dostępne z trójprzewodowym wyjściem napięciowym lub dwuprzewodowym wyjściem prądowym. Każda z tych wersji oferuje czułość średnią (130Gs), wysoką (59Gs) lub programowaną. Urządzenie charakteryzuje się wysoką czułością i posiada zakres aktywacji 18mm (0,709in) z zastosowaniem określonego w specyfikacji magnesu. Wyjście obniżające może przyjmować napięcie do 24V= i prąd 20mA.
Czujnik może pracować przy częstotliwościach przełączania do 10kHz i może wykrywać zarówno statyczne, jak i dynamiczne pola magnetyczne. Zdolność do wykrywania statycznych pól magnetycznych jest znaczącą zaletą czujników hallotronowych, która pozwala na ich użycie do wykrywania zamkniętych drzwi lub obiektów w ustalonym położeniu.
Optyczny czujnik zbliżeniowy
Optyczne czujniki zbliżeniowe do wykrywania obiektów wykorzystują światło podczerwone lub widzialne. Ich zaletą jest to, że obiekt docelowy nie musi być metalowy ani magnetyczny - wystarczy że zasłania lub odbija światło. Zasadniczo czujniki optyczne emitują światło i monitorują światło odbite od obiektu docelowego (ilustracja 5, po lewej).
 Ilustracja 5: optyczny czujnik zbliżeniowy wykrywa obiekt docelowy poprzez emitowanie wiązki światła i wykrywanie odbicia od obiektu docelowego. (Źródło ilustracji: Art Pini)
Ilustracja 5: optyczny czujnik zbliżeniowy wykrywa obiekt docelowy poprzez emitowanie wiązki światła i wykrywanie odbicia od obiektu docelowego. (Źródło ilustracji: Art Pini)
Dobrym przykładem optycznego czujnika zbliżeniowego jest urządzenie EE-SY1200 firmy Omron Electronics (ilustracja 5,). Jest to ultrakompaktowy fotoczujnik zamontowany na niewielkiej płytce drukowanej (PCB), który działa przy długości fali podczerwonej 850nm. Zawiera on emiter LED oraz fototranzystor w obudowie do montażu powierzchniowego, posiadającej wymiary 1,9 x 3,2 x 1,1mm (0,0748 x 0,126 x 0,043”) i może działać w zakresie temperatur od -25 do +85°C. Zalecany zakres odległości wykrywania: od 1.0 do 4,0mm (od 0,039 do 0,157”).
Dzięki zajmowaniu niewielkiej ilości miejsca na płytce, idealnie nadaje się do takich zastosowań, jak np. wyrównywanie materiału mylarowego w automatycznych maszynach owijających.
Ultradźwiękowe czujniki zbliżeniowe
Jeżeli wymagane są większe odległości wykrywania, na przykład wykrywanie pojazdów w oknach restauracji dla zmotoryzowanych, można zastosować czujniki zbliżeniowe wykorzystujące ultradźwięki. Czujniki te wykrywają obiekty dowolnego typu w odległościach dochodzących do kilku metrów. Zasada działania opiera się na pomiarze czasu przelotu impulsu ultradźwiękowego emitowanego przez nadajnik czujnika, który odbija się od obiektu docelowego i jest wykrywany przez odbiornik czujnika (ilustracja 6).
") Ilustracja 6: dalmierz ultradźwiękowy mierzy czas, jaki upływa od wyemitowania impulsu ultradźwiękowego przez nadajnik (po lewej) do momentu odebrania odbitego impulsu (po prawej). Jest to dwukrotność czasu przelotu pierwotnego impulsu od czujnika do obiektu docelowego. (Źródło ilustracji: Art Pini)
Ilustracja 6: dalmierz ultradźwiękowy mierzy czas, jaki upływa od wyemitowania impulsu ultradźwiękowego przez nadajnik (po lewej) do momentu odebrania odbitego impulsu (po prawej). Jest to dwukrotność czasu przelotu pierwotnego impulsu od czujnika do obiektu docelowego. (Źródło ilustracji: Art Pini)
Czas, jaki upłynął od momentu nadania impulsu do chwili odebrania odbicia jest czasem przelotu od czujnika do obiektu docelowego i z powrotem. Znając prędkość propagacji oraz czas przelotu można obliczyć odległość. W poniższym przykładzie czas przelotu wynosi 3,1ms. Prędkość dźwięku w powietrzu o temperaturze 21°C wynosi 344m/s, zatem odległość do obiektu i z powrotem wynosi 1,066m. Odległość obiektu od czujnika jest połową wartości obliczonej z czasu przelotu, czyli 0,533m.
Ultradźwiękowy czujnik zbliżeniowy MB1634-000 firmy MatBotix posiada zakres pomiarowy 5m (16,4’). Wymaga on źródła zasilania o napięciu od 2,5 do 5,5V. Działa z częstotliwością 42kHz i dostarcza sygnału wyjściowego odległości od obiektu docelowego w postaci napięcia analogowego, szerokości impulsu lub strumienia danych szeregowych logiki tranzystorowo-tranzystorowej (TTL). Wyposażono go w kompensację różnic wynikających z wielkości obiektu docelowego, napięcia roboczego i temperatury wewnętrznej (opcjonalna kompensacja temperatury zewnętrznej) oraz obudowę o wymiarach 22,23 x 38,05 x 14,73 mm (0,875 x 1,498 x 0,58”) (ilustracja 7).
 Ilustracja 7: zespół dalmierza ultradźwiękowego MB1634-000 z przetwornikami nadawania i odbioru o zasięgu 5m. (Źródło ilustracji: MaxBotix Inc.)
Ilustracja 7: zespół dalmierza ultradźwiękowego MB1634-000 z przetwornikami nadawania i odbioru o zasięgu 5m. (Źródło ilustracji: MaxBotix Inc.)
Pojemnościowe czujniki zbliżeniowe
Pojemnościowe czujniki zbliżeniowe mogą wykrywać metalowe i niemetalowe obiekty docelowe w postaci pyłu, granulatu, cieczy lub ciała stałego. Dobrym przykładem jest urządzenie CD50CNF06NO firmy Carlo Gavazzi (ilustracja 8). Urządzenia te są generalnie podobne do czujników indukcyjnych, jednakże cewki pomiarowe czujnika indukcyjnego są zastąpione przez pojemnościową płytkę pomiarową. Najczęściej są one stosowane do pomiaru poziomów płynów w zbiornikach magazynowych.
 Ilustracja 8: w ogólnym pojemnościowym czujniku zbliżeniowym (po lewej) pojemnościowa płytka pomiarowa tworzy kondensator z zewnętrznym obiektem docelowym. Wartość jego pojemności determinuje częstotliwość oscylatora. Pojemnościowy czujnik zbliżeniowy CD50CNF06NO firmy Carlo Gavazzi (po prawej) przeznaczony jest do monitorowania poziomu płynów. (Źródło ilustracji: Art Pini)
Ilustracja 8: w ogólnym pojemnościowym czujniku zbliżeniowym (po lewej) pojemnościowa płytka pomiarowa tworzy kondensator z zewnętrznym obiektem docelowym. Wartość jego pojemności determinuje częstotliwość oscylatora. Pojemnościowy czujnik zbliżeniowy CD50CNF06NO firmy Carlo Gavazzi (po prawej) przeznaczony jest do monitorowania poziomu płynów. (Źródło ilustracji: Art Pini)
Płytka pomiarowa czujnika tworzy kondensator z obiektem docelowym, którego pojemność różni się w zależności od odległości od obiektu. Pojemność tworzona przez element pomiarowy i obiekt docelowy determinuje częstotliwość oscylatora, która jest monitorowana w celu przełączenia stanu wyjścia po przekroczeniu częstotliwości progowej.
Urządzenie CD50CNF06N0 przeznaczone jest do monitorowania poziomu płynów. Jest to czujnik trójprzewodowy z tranzystorem NPN z otwartym kolektorem w konfiguracji normalnie otwartej. Wymaga on zasilania o napięciu od 10 do 30V=. Obudowa ma wymiary 50 x 30 x 7mm (1,97 x 1,18 x 0,28”), a zasięg wykrywania wynosi 6mm (0,24”). W normalnej konfiguracji do pomiaru poziomu jest on przyklejany lub przykręcany na zewnątrz niemetalowego zbiornika.
Podsumowanie
Czujniki zbliżeniowe wykorzystują wiele technologii odpowiednich do różnych zastosowań. W zależności od rodzaju czujnika mogą one wykrywać metalowe lub niemetalowe obiekty docelowe znajdujące się w odległościach od kilku milimetrów do pięciu metrów i więcej. Kompaktowe rozmiary umożliwiają stosowanie w ciasnych przestrzeniach, a wiele z nich może pracować w trudnych warunkach środowiskowych. Omówiony zakres technologii oferuje użytkownikom wybór umożliwiający spełnienie najróżniejszych wymagań w zakresie wykrywania.
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.