Mniejsze obawy dotyczące zasięgu pojazdów elektrycznych (EV) i większe bezpieczeństwo dzięki użyciu zintegrowanego sterowania polowo-zorientowanego silnikami i zaawansowanych czujników
Przekazane przez: Północnoamerykańscy redaktorzy DigiKey
2022-01-05
Projektanci systemów pojazdów elektrycznych (EV) i hybrydowych pojazdów elektrycznych (HEV) (często określanych jako xEV) są pod ciągłą presją, aby gwarantować możliwość przebycia jak największej liczby kilometrów na jednym ładowaniu, aby zmniejszyć obawy związane z zasięgiem tych pojazdów i zmniejszyć ich ślad węglowy. Jednocześnie muszą dodawać więcej silników, czujników, powiązanej elektroniki, procesorów i oprogramowania, aby sprostać wyższym poziomom autonomii pojazdu, funkcji użytkownika i bezpieczeństwa, jednocześnie obniżając koszty.
Silniki do drzwi, okien, wentylatory chłodzące akumulatory, wentylatory chłodnicy i pompy oraz inne funkcje są szczególnie kłopotliwe, ponieważ nie tylko zwiększają wagę, ale także wymagają zaawansowanych algorytmów sterowania, takich jak sterowanie polowo-zorientowane (FOC), aby zminimalizować zakłócenia i zużycie energii, przy jednoczesnym zapewnieniu płynnej reakcji. Cały proces projektowania systemu jest skomplikowany ze względu na konieczność spełnienia wymagań bezpieczeństwa funkcjonalnego zawartych w normie ISO 26262 oraz standardów jakości zawartych w normie AEC-Q100.
Aby sprostać tym wyzwaniom, projektanci mogą sięgnąć po różnorodne urządzenia dopuszczone do stosowania w branży motoryzacyjnej zapewniające wyższy poziom zaawansowania sprzętu i oprogramowania, które upraszczają projektowanie oraz integrację różnych funkcji, przy jednoczesnej redukcji liczby części i zajmowanego miejsca.
W tym artykule omówiono problemy, z jakimi borykają się projektanci pojazdów elektrycznych i hybrydowych (EV i HEV). Przedstawiono także sposoby wykorzystania wysoce zintegrowanego kontrolera silnika bezszczotkowego prądu stałego (BLDC) do sterowania polowo-zorientowanego (FOC) i powiązanej płytki ewaluacyjnej w celu ułatwienia projektowania wydajnej konstrukcji silnika do pojazdów EV/HEV. Przedstawiono też różne czujniki do monitorowania prądu, pozycji 3D, prędkości i kierunku. Wszystkie te komponenty pochodzą od jednej firmy, Allegro MicroSystems.
Problemy związane z kosztami, bezpieczeństwem i zasięgiem występujące w pojazdach elektrycznych
Problemów, które projektanci pojazdów elektrycznych i hybrydowych (xEV) muszą rozwiązać, jest wiele, a niektóre z nich to koszt pojazdu, bezpieczeństwo i niezawodność - zwłaszcza w świetle rosnącego poziomu autonomii pojazdu, zasięgu na jednym ładowaniu (obawy dotyczące zasięgu) i okresu użytkowania pakietu baterii.
Aby wspierać bezpieczeństwo i niezawodność, potrzebne są zaawansowane czujniki, które spełniają wymagania zaawansowanych systemów wspomagania kierowcy (ADAS) zgodnie z normą ISO 26262. Jeśli chodzi o koszty i zasięg, projektanci zwrócili się w kierunku szyn zasilających o wyższym napięciu (do 800V), aby uzyskać większą sprawność i zmniejszyć wagę kabli, a także wykorzystać ulepszenia konstrukcji pakietów baterii.
Na przykład lepsze odprowadzanie ciepła baterii przyczyniło się do większego zasięgu jazdy i dłuższego okres eksploatacji baterii, a udoskonalenie chłodzenia przemienników trakcyjnych pojazdów elektrycznych i hybrydowych (EV/HEV) pomaga zwiększyć moc i gęstość energii oraz zmniejszyć wagę.
Wyższy poziom integracji urządzeń półprzewodnikowych zapewnia większą funkcjonalność przy mniejszej wadze i mniejszej przestrzeni, jednak silniki bezszczotkowe prądu stałego (BLDC) napędzające niezbędne wentylatory chłodzące wymagają precyzyjnego sterowania w celu optymalizacji sprawności. Aby to osiągnąć, w sterowniku bramki kontrolera silnika można zastosować zaawansowane algorytmy sterowania silnikiem, takie jak sterowanie polowo-zorientowane (FOC).
Wysokowydajne chłodzenie
Sterowanie polowo-zorientowane (FOC) umożliwia płynną pracę silników elektrycznych w całym zakresie prędkości i może generować pełny moment obrotowy przy rozruchu. Ponadto sterowanie FOC zapewnia szybkie i płynne przyspieszanie i zwalnianie silnika, co jest przydatne do dokładnego sterowania w zastosowaniach wymagających wysokiej wydajności ruchu. Sterowanie polowo-zorientowane (FOC) można wykorzystać do opracowywania kompaktowych i cichych sterowników niskonapięciowych (LV) (50V= i niższych) o wysokiej sprawności dla szeregu wysokowydajnych bezszczotkowych silników prądu stałego (BLDC) o mocy do 500W. Są one zwykle stosowane w wysokonapięciowych (HV) wentylatorach chłodzących baterie pojazdów xEV, a także w dmuchawach ogrzewania, wentylacji i klimatyzacji (HVAC) oraz pompach cieczy w układach chłodzenia przemienników trakcyjnych wysokiego napięcia (HV) (ilustracja 1).
") Ilustracja 1: kontrolery silników wykorzystujące sterowanie polowo-zorientowane (FOC) mogą wykorzystywać bateryjne zasilanie niskiego napięcia (LV) do chłodzenia akumulatorów przemienników trakcyjnych wysokiego napięcia (HV) w pojazdach xEV. (Źródło ilustracji: Allegro MicroSystems)
Ilustracja 1: kontrolery silników wykorzystujące sterowanie polowo-zorientowane (FOC) mogą wykorzystywać bateryjne zasilanie niskiego napięcia (LV) do chłodzenia akumulatorów przemienników trakcyjnych wysokiego napięcia (HV) w pojazdach xEV. (Źródło ilustracji: Allegro MicroSystems)
W konwencjonalnych konstrukcjach sterowanie polowo-zorientowane (FOC) jest realizowane z użyciem zewnętrznych czujników wykorzystujących mikrokontroler. Takie konstrukcje, nazywane bezpośrednim sterowaniem polowo-zorientowanym mogą być złożone i zwykle ich bolączką jest gorsza odpowiedź dynamiczna wynikająca z polegania na zewnętrznych czujnikach mierzących parametry pracy silnika.
Sterowanie polowo-zorientowane o zwiększonej wydajności i niższych kosztach jest możliwe dzięki wyeliminowaniu czujników zewnętrznych.
Niemniej informacje z brakujących czujników są nadal potrzebne dla wdrożenia sterowania polowo-zorientowanego. Można je wydobyć z napięć i natężeń prądu na zaciskach silnika powodowanych przez siłę przeciwelektromotoryczną w uzwojeniach silnika. Chociaż sprzęt jest prostszy, wdrożenie bezczujnikowego sterowania polowo-zorientowanego wymaga bardziej złożonego oprogramowania sterującego.
Algorytm bezczujnikowego sterowania polowo-zorientowanego (FOC) może zapewnić najwyższą sprawność i odpowiedź dynamiczną przy jednoczesnej minimalizacji hałasu akustycznego. Zapewnia również elastyczność rozruchu w otwartej pętli, gdy silnik jest zatrzymany i brak jest dostępnych informacji o sile przeciwelektromotorycznej (BEMF).
Łatwe sterowanie polowo-zorientowane samochodowych wentylatorów i pomp chłodzących
Większość sterowników silników bezszczotkowych prądu stałego (BLDC) wykorzystujących sterowanie polowo-zorientowane (FOC) wymaga od deweloperów zapisania i przeniesienia algorytmu do mikroprocesora lub mikrokontrolera, jednak w przypadku sterownika A89307KETSR-J firmy Allegro MicroSystems bezczujnikowy algorytm sterowania polowo-zorientowanego (FOC) jest bezpośrednio wbudowany w sterownik bramek. Dysponując zaledwie pięcioma zewnętrznymi komponentami pasywnymi (cztery kondensatory i jeden rezystor), sterownik A89307KETSR-J minimalizuje również wykaz materiałów (BOM), poprawia niezawodność i zmniejsza złożoność projektu (ilustracja 2).
") Ilustracja 2: typowy obwód realizacji wentylatora chłodzącego pakiet baterii pojazdu xEV ze sterownikiem A89307KETSR-J zawiera pięć komponentów zewnętrznych: cztery kondensatory i jeden rezystor. (Źródło ilustracji: Allegro MicroSystems)
Ilustracja 2: typowy obwód realizacji wentylatora chłodzącego pakiet baterii pojazdu xEV ze sterownikiem A89307KETSR-J zawiera pięć komponentów zewnętrznych: cztery kondensatory i jeden rezystor. (Źródło ilustracji: Allegro MicroSystems)
Sterownik bramek A89307KETSR-J działa w zakresie napięć prądu stałego od 5,5V do 50V. Zintegrowany algorytm sterowania polowo-zorientowanego (FOC) obejmuje tryby stałego momentu obrotowego i stałej mocy, a także pracy w pętli otwartej ze stałą prędkością. Sterownik A89307KETSR-J odbiera sygnały wejściowe sterowania prędkością w trybie modulacji szerokości impulsu (PWM) lub w trybie zegara, hamowania oraz zmiany kierunku, a generuje sygnały wyjściowe dla stanów usterek i prędkości silnika (ilustracja 3).
") Ilustracja 3: wewnętrzny schemat blokowy sterownika A89307KETSR-J ukazuje kontroler sterowania polowo-zorientowanego (FOC) (w środku), wejścia sterowania prędkością (SPD) w trybie modulacji szerokości impulsu (PWM) lub trybie zegara (SPD), wejścia hamowania (BRAKE) i kierunku (DIR) (po lewej) oraz wyjścia usterek (FAULT) i wyjścia prędkości silnika (FG) (również po lewej stronie). (Źródło ilustracji: Allegro MicroSystems)
Ilustracja 3: wewnętrzny schemat blokowy sterownika A89307KETSR-J ukazuje kontroler sterowania polowo-zorientowanego (FOC) (w środku), wejścia sterowania prędkością (SPD) w trybie modulacji szerokości impulsu (PWM) lub trybie zegara (SPD), wejścia hamowania (BRAKE) i kierunku (DIR) (po lewej) oraz wyjścia usterek (FAULT) i wyjścia prędkości silnika (FG) (również po lewej stronie). (Źródło ilustracji: Allegro MicroSystems)
Sterownik A89307KETSR-J jest zoptymalizowany pod kątem obsługi zewnętrznych tranzystorów mocy MOSFET z kanałem N o niskiej rezystancji w stanie włączenia. Może dostarczać duże szczytowe prądy sterujące potrzebne do szybkiego włączania i wyłączania tranzystorów MOSFET w celu zminimalizowania strat mocy podczas przełączania, poprawy sprawności operacyjnej i zmniejszenia problemów związanych z odprowadzaniem ciepła. Dostępnych jest wiele poziomów sterowania bramkami, co pozwala projektantom na optymalizację kompromisu pomiędzy emisją zakłóceń elektromagnetycznych (EMI) a sprawnością. Szybkie włączanie tranzystorów MOSFET zmniejsza straty przełączania, ale zwiększa zakłócenia elektromagnetyczne, podczas gdy przy wolniejszym włączaniu tranzystorów MOSFET zakłócenia te są mniejsze. Kompromis polega na zwiększeniu strat przełączania i zmniejszeniu sprawności.
Prędkością silnika można sterować przez wejście modulacji szerokości impulsu (PWM), wejście analogowe lub zegarowe (CLOCK). Sterowanie prędkością w pętli zamkniętej jest funkcją opcjonalną, w przypadku której stosunek prędkości w obrotach na minutę do częstotliwości zegara jest parametrem programowalnym. Bezczujnikowe sterowanie rozruchem obejmuje wykrywanie i synchronizację obrotów wstępnych do przodu i do tyłu (wiatrak), dzięki którym sterownik A89307KETSR-J może działać w szerokim zakresie konfiguracji silnika i obciążeń.
Dodatkowo parametry rozruchu poprawia algorytm rozruchu przeciwwstecznego firmy Allegro MicroSystems. Silnik uruchomi się we właściwym kierunku po włączeniu, bez wstecznych wibracji lub wstrząsów. Funkcja płynnego włączania i wyłączania stopniowo zwiększa natężenie prądu dostarczanego do silnika po wydaniu polecenia włączenia (stan wiatraka) i stopniowo zmniejsza natężenie prądu płynącego z silnika po wydaniu polecenia wyłączenia, jeszcze bardziej redukując hałas akustyczny (ilustracja 4).
 Ilustracja 4: przebiegi prądu A89307KETSR-J dla płynnego włączania (u góry) i płynnego wyłączania (na dole) zapewniają płynną pracę silnika i zmniejszenie hałasu akustycznego. (Źródło ilustracji: Allegro MicroSystems)
Ilustracja 4: przebiegi prądu A89307KETSR-J dla płynnego włączania (u góry) i płynnego wyłączania (na dole) zapewniają płynną pracę silnika i zmniejszenie hałasu akustycznego. (Źródło ilustracji: Allegro MicroSystems)
Sterownik A89307KETSR-J zawiera interfejs I2C do ustawiania znamionowego prądu, napięcia, prędkości, rezystancji i profilu rozruchowego silnika. Interfejs I2C obsługuje również włączanie/wyłączanie i sterowanie prędkością, a także sprzężenie zwrotne prędkości i sygnały usterek.
Płytka ewaluacyjna bezczujnikowego sterowania polowo-zorientowanego (FOC)
Płytka ewaluacyjna APEK89307KET-01-T-DK i powiązane z nią oprogramowanie pozwala projektantom przyspieszyć proces opracowywania napędów z użyciem silników bezszczotkowych prądu stałego (BLDC) opartych na sterowaniu polowo-zorientowanym (FOC) z wykorzystaniem sterownika A89307KETSR-J (ilustracja 5). Wspomniana płytka zawiera sterownik A89307KETSR-J z dostępem do wszystkich styków wejściowych i wyjściowych oraz kompletny trójfazowy stopień mocy do zasilania silnika bezszczotkowego prądu stałego (BLDC). Projektanci mogą wybrać parametry sterownika polowo-zorientowanego (FOC) za pomocą prostego graficznego interfejsu użytkownika (GUI) i wczytać je do wbudowanej pamięci EEPROM. Minimalny wykaz materiałów BOM sterownika A89307KETSR-J umożliwia projektowanie napędów mieszczących się wewnątrz obudowy silnika, co dodatkowo zmniejsza rozmiary rozwiązania.
 Ilustracja 5: płytka ewaluacyjna APEK89307KET-01-T-DK posiada sterownik A89307KETSR-J (U1, środkowa lewa strona płytki) i sześć tranzystorów MOSFET (prawa strona) do zasilania silnika bezszczotkowego prądu stałego (BLDC). (Źródło ilustracji: Allegro MicroSystems)
Ilustracja 5: płytka ewaluacyjna APEK89307KET-01-T-DK posiada sterownik A89307KETSR-J (U1, środkowa lewa strona płytki) i sześć tranzystorów MOSFET (prawa strona) do zasilania silnika bezszczotkowego prądu stałego (BLDC). (Źródło ilustracji: Allegro MicroSystems)
Czujniki do zaawansowanych systemów wspomagania kierowcy (ADAS)
W celu wdrożenia kompaktowych i ekonomicznych funkcji zaawansowanych systemów wspomagania kierowcy (ADAS) w pojazdach xEV projektanci systemów muszą zadbać o pomiar poziomów natężenia prądu w napędach silnikowych, przetwornicach prądu stałego i przemiennikach, a także wykrywanie pozycji obrotowych zaworów przepustnicy i siłowników oraz prędkości i kierunku pracy kół zębatych w układach przeniesienia napędu. Firma Allegro MicroSystems oferuje różnorodne rozwiązania czujnikowe do zaawansowanych systemów wspomagania kierowcy, jak na przykład:
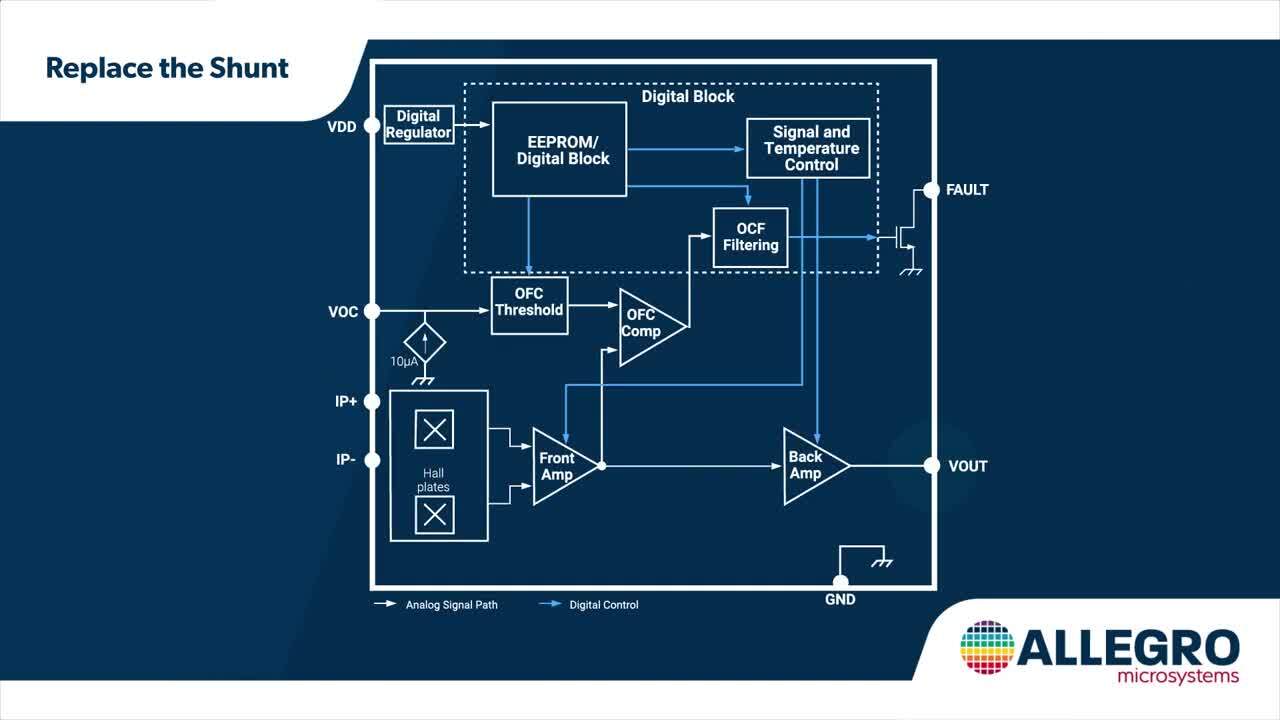
Pomiar prądu: czujnik ACS72981KLRATR-150B3 zapewnia projektantom ekonomiczny i precyzyjny pomiar prądu stałego i zmiennego. Ten precyzyjny liniowy czujnik prądu z efektem Halla ma szerokość pasma 250kHz i jest przeznaczony do stosowania w sterowaniu silnikami, przetwornicami prądu stałego, przemiennikami oraz w wykrywaniu obciążenia i zarządzaniu nim. Jest to układ scalony z certyfikatem AEC-Q100, którego czas odpowiedzi wynosi <2µs, co pozwala na szybkie wykrywanie usterek nadmiernych prądów w rozwiązaniach o kluczowym znaczeniu dla bezpieczeństwa.
Pomiar pozycji 3D: bezdotykowy, liniowy i obrotowy magnetyczny pomiar pozycji 3D przepustnicy, zaworów, siłowników i przekładni można szybko wdrożyć za pomocą układu scalonego 3DMAG A31315LOLATR-XY-S-SE-10 firmy Allegro MicroSystems. Urządzenie może mierzyć ruch obrotowy w płaszczyźnie poziomej i pionowej oraz ruch liniowy w poprzek lub wzdłuż (ilustracja 6).
 Ilustracja 6: czujnik pozycji 3D A31315LOLATR-XY-S-SE-10 może mierzyć ruch obrotowy w płaszczyźnie poziomej i pionowej oraz mierzyć ruch liniowy w poprzek i wzdłuż. (Źródło ilustracji: Allegro MicroSystems)
Ilustracja 6: czujnik pozycji 3D A31315LOLATR-XY-S-SE-10 może mierzyć ruch obrotowy w płaszczyźnie poziomej i pionowej oraz mierzyć ruch liniowy w poprzek i wzdłuż. (Źródło ilustracji: Allegro MicroSystems)
Czujnik A31315LOLATR-XY-S-SE-10 daje projektantom możliwość wyboru formatów wyjściowych ratiometrycznych analogowych, PWM lub SAE J2716 SENT. Został on opracowany z myślą o spełnieniu wymagań normy ISO 26262 ASIL B (pojedyncza struktura, w obudowie SOIC-8) i ASIL D (redundantne dwie struktury, w obudowie TSSOP-14) w motoryzacyjnych systemach bezpieczeństwa.
Prędkość i kierunek: czujnik ATS19520LSNBTN-RSWHPYU to odporny na wibracje, różnicowy zębaty czujnik z efektem Halla do pomiaru prędkości i kierunku pracy przekładni napędowych, dostępny w modelach z wykrywaniem kierunku do przodu i do tyłu (ilustracja 7).
 Ilustracja 7: przedstawiony wariant „F” czujnika ATS19520 mierzy obroty do przodu, gdy ząb koła zębatego przechodzi w kierunku od wtyku 1 do wtyku 3 (u góry), oraz obroty do tyłu, gdy ząb koła zębatego przechodzi w kierunku od wtyku 3 do wtyku 1 (u dołu). Wariant „R” mierzy obroty w przeciwnych kierunkach. (Źródło ilustracji: Allegro MicroSystems)
Ilustracja 7: przedstawiony wariant „F” czujnika ATS19520 mierzy obroty do przodu, gdy ząb koła zębatego przechodzi w kierunku od wtyku 1 do wtyku 3 (u góry), oraz obroty do tyłu, gdy ząb koła zębatego przechodzi w kierunku od wtyku 3 do wtyku 1 (u dołu). Wariant „R” mierzy obroty w przeciwnych kierunkach. (Źródło ilustracji: Allegro MicroSystems)
Czujnik zgodny z normą ISO 26262 ASIL B posiada zintegrowane funkcje diagnostyczne i nadaje się do stosowania w układach napędowych pojazdów xEV. Omawiany trzywtykowy komponent w obudowie SIP zawiera zintegrowany magnes polaryzacji zaporowej do pomiaru prędkości i kierunku obracających się obiektów ferromagnetycznych oraz zintegrowany kondensator zapewniający kompatybilność elektromagnetyczną.
Podsumowanie
Zintegrowane napędy silnikowe z bezczujnikowym sterowaniem polowo-zorientowanym (FOC) bezszczotkowych silników prądu stałego (BLDC), wraz z czujnikami prądu, magnetycznymi czujnikami pozycji i czujnikami obrotu, są kluczowymi komponentami umożliwiającymi projektowanie wydajnych i bezpiecznych pojazdów xEV o większym zasięgu i mniejszym śladzie węglowym. W szczególności zastosowanie napędów silnikowych ze sterowaniem polowo-zorientowanym (FOC) umożliwia projektowanie wydajniejszych i cichszych systemów chłodzenia pakietów baterii i przemienników trakcyjnych z poprawioną odpowiedzią dynamiczną. Z kolei kompaktowe, dokładne i energooszczędne czujniki mają kluczowe znaczenie dla rozwoju pojazdów xEV spełniających wymagania niezawodnościowe stawiane zaawansowanym systemom wspomagania kierowcy oraz wymogi bezpieczeństwa funkcjonalnego określone normą ISO 26262.
Rekomendowane artykuły
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.