Nowe aktuatory piezoelektryczne zapewniają lepszą haptyczną reakcję w projektach przenośnych ekranów dotykowych
Przekazane przez: Północnoamerykańscy redaktorzy DigiKey
2020-02-13
Interfejsy użytkownika z ekranami dotykowymi stają się wszechobecne ze względu na niezaprzeczalne zalety w porównaniu z interfejsami mechanicznymi. Konsumenci uważają, że interfejs jest elegancki i intuicyjny, a użytkownicy przemysłowi mogą uniknąć problemów z przedostawaniem się do niego brudu i wilgoci, dzięki szczelnemu wyświetlaczowi. Ale obie grupy użytkowników dostrzegają też minusy. Konsumentom, na przykład, może brakować wygody i satysfakcji z użytkowania mechanicznego przełącznika, a użytkownicy przemysłowi mogą mieć problem z naciśnięciem przycisku, jeśli korzystają z ekranu dotykowego w rękawicach.
Aby wyeliminować braki w „odczuwaniu” dotyku w ekranach dotykowych, zastosowano potwierdzenie haptyczne, w którym wibracje świadczą o naciśnięciu przycisku, ale istniejące rozwiązania zazwyczaj wykorzystują nieporęczne i złożone układy mechaniczne. Należą do nich silniki z niesymetrycznym obciążeniem mechanicznym wirnika masą (ERM) oraz aktuatory z rezonatorem liniowym (LRA). Piezoelektryczne potwierdzenie haptyczne zwrotne to bardziej kompaktowa i elastyczna alternatywa. Do niedawna jednak wysokie napięcia robocze utrudniały wykorzystanie go w zastosowaniach o niskim zużyciu energii, co jest kluczowym wymogiem w przypadku produktów końcowych z zasilaniem bateryjnym.
Jednak postęp w dziedzinie piezoelektrycznych rozwiązań haptycznych „wysokiej wyczuwalności” nie tylko rozwiązuje problemy związane ze zużyciem energii, ale także oferuje inne korzyści w zakresie projektowania interfejsów haptycznych, takie jak kompaktowy kształt o niskim profilu, duża siła potwierdzenia oraz krótki czas reakcji.
W niniejszym artykule pokrótce omówiono zalety nowych piezoelektrycznych aktuatorów haptycznych i porównano je z technologiami ERM i LRA sprzed wprowadzenia urządzeń nowej generacji opartych na wielowarstwowych strukturach i dwubiegunowych trybach sterowania, które, wraz z wydajnymi i przeznaczonymi do tego celu sterownikami, uwzględniają wcześniejsze obawy dotyczące zużycia energii. Następnie w artykule pokazano, w jaki sposób inżynier może wykorzystać aktuatory i sterowniki w kolejnych produktach z dotykowym ekranem haptycznym, wykorzystując przykładowe urządzenia haptyczne firmy TDK oraz sterowniki firm Boréas Technologies i Texas Instruments (TI).
Możliwości realizacji potwierdzenia haptycznego
Projektanci chcący dodać potwierdzenie haptyczne do interfejsu ekranu dotykowego mają do wyboru trzy opcje: ERM, LRA i aktuatory piezoelektryczne. Wszystkie trzy opierają się na tej samej podstawowej zasadzie, zgodnie z którą mikrokontroler nadzoruje pracę, a sterownik kieruje aktuatorem w celu generowania wibracji (ilustracja 1). Różnice polegają na tym, w jaki sposób powstają te wibracje: ERM używa obciążenia obracającego się poza centrum ciężkości, LRA wykorzystuje element magnetyczny zawieszony na sprężynach z cewkami, a urządzenie piezoelektryczne opiera się na (odwrotnym) zjawisku piezoelektrycznym, które powoduje zmianę wymiarów kryształu lub obiektu ceramicznego pod wpływem pola elektrycznego.
 Ilustracja 1: systemy haptyczne ekranów dotykowych składające się z mikrokontrolera, sterownika i aktuatora. W tym przykładzie aktuator jest urządzeniem piezoelektrycznym, ale ERM i LRA są popularnymi alternatywami. (Źródło ilustracji: Boréas Technologies)
Ilustracja 1: systemy haptyczne ekranów dotykowych składające się z mikrokontrolera, sterownika i aktuatora. W tym przykładzie aktuator jest urządzeniem piezoelektrycznym, ale ERM i LRA są popularnymi alternatywami. (Źródło ilustracji: Boréas Technologies)
ERM i LRA okazały się popularne w przenośnych konstrukcjach przede wszystkim dlatego, że oferują opcję niskiego napięcia (około 3V) a konstrukcja sterownika jest prosta. Natomiast konwencjonalne urządzenia piezoelektryczne wymagają znacznie wyższych napięć (do 200V), aby generować wystarczające odkształcenia mechaniczne skutkujące odpowiednimi drganiami, które odpowiadają użytkownikom. Tak wysokie napięcia są potrzebne, ponieważ konwencjonalna technologia haptycznych sterowników piezoelektrycznych jest zazwyczaj oparta na zmniejszonej do odpowiedniej skali technologii wzmacniaczy audio i nie została opracowana od podstaw z myślą o niskiej mocy. Dodatkowym wyzwaniem projektowym był brak odpowiednich sterowników aktuatorów haptycznych o niskiej mocy, co zmusiło projektantów do korzystania z mniej efektywnych rozwiązań.
Kluczową zaletą rozwiązań piezoelektrycznych jest jednak to, że obsługują one technologię haptyczną wysokiej wyczuwalności, która oferuje potwierdzenie wykraczające poza proste, monotoniczne wibracje. Na przykład aktuatory piezoelektryczne mogą wytwarzać drgania o różnej częstotliwości i amplitudzie i mogą być wykorzystywane do sygnalizowania różnych wyników po naciśnięciu tego samego przycisku (ilustracja 2).
") Ilustracja 2: piezoelektryczne aktuatory haptyczne umożliwiają wytworzenie szeregu drgań, które mogą być wykorzystane do wskazywania różnych wyników po aktywacji tego samego przycisku. (Źródło ilustracji: Boréas Technologies)
Ilustracja 2: piezoelektryczne aktuatory haptyczne umożliwiają wytworzenie szeregu drgań, które mogą być wykorzystane do wskazywania różnych wyników po aktywacji tego samego przycisku. (Źródło ilustracji: Boréas Technologies)
Podsumowując, potwierdzenia haptyczne o wysokiej wyczuwalności wymagają:
- szerokiej przepustowości w celu uzyskania szeregu różnych częstotliwości i trybów drgań
- dużego przyspieszenia [g] w celu uzyskania większej siły potwierdzenia
- dużego przesunięcia, które zwiększa czułość potwierdzenia haptycznego
- niskich opóźnień, ponieważ krótki czas reakcji zwiększa zakres potwierdzenia
W tabeli 1 podsumowano parametry każdego z rozwiązań potwierdzenia haptycznego i wykazano, że rozwiązania piezoelektryczne są jedynym wyborem w przypadku zastosowań o wysokiej rozdzielczości, ponieważ gwarantują połączenie wymaganej szerokości pasma, siły i czułości potwierdzenia oraz niskie opóźnienia.
|
Tabela 1: porównanie charakterystyki pracy rozwiązań z potwierdzeniem haptycznym. Urządzenia piezoelektryczne gwarantują dobre przyspieszenie (mierzone w „g”, gdzie 1g to przyspieszenie spowodowane grawitacją na powierzchni Ziemi (9,81m/s2)), odpowiednie przemieszczenie i krótki czas reakcji oraz niestandardowe przebiegi fali wymagane w przypadku potwierdzenia haptycznego o wysokiej wyczuwalności. (Źródło ilustracji: DigiKey, autor)
Należy zauważyć, że po części większa złożoność sterowników do aktuatorów piezoelektrycznych wynika z dodatkowej funkcjonalności potrzebnej do generowania niestandardowych przebiegów fali, które definiują potwierdzenie haptyczne i nadają mu kontekst. ERM i LRA nie mogą generować niestandardowych przebiegów fali, więc sterowniki są prostsze.
Zalety nowych piezoelektrycznych urządzeń z potwierdzeniem haptycznym
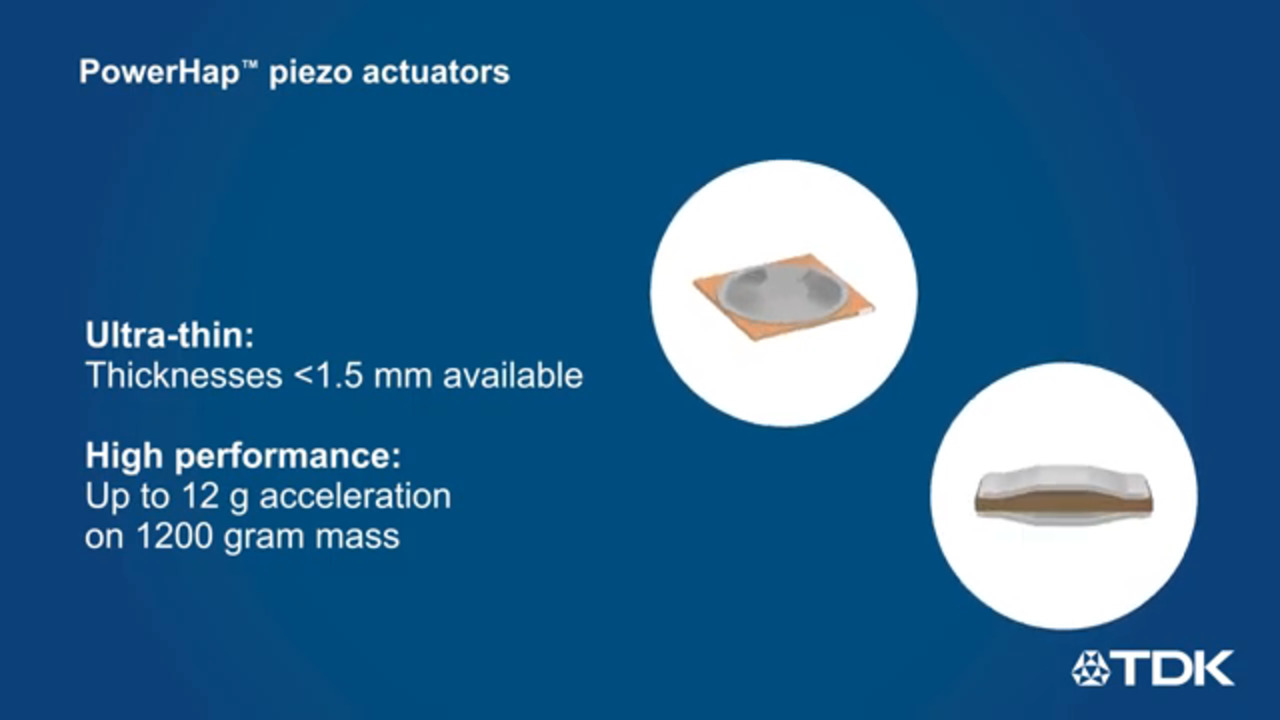
Niedawne pojawienie się nowych produktów zarówno w zakresie aktuatorów piezoelektrycznych, jak i wydajnych, odpowiednich sterowników sprawiły, że technologie te stały się znacznie lepszym rozwiązaniem dla urządzeń zasilanych bateryjnie. Na przykład ostatnio wprowadzone na rynek piezoelektryczne produkty haptyczne, takie jak PowerHap B54102H1020A001 firmy TDK (o powierzchni 12,7 milimetra kwadratowego (mm2)) i B54101H1020A001 (26 mm2) mają wysokość mniejszą niż 2,5 mm i zamiast jednej warstwy stosowanej w urządzeniach opartych na technologii wzmacniaczy audio wykorzystują strukturę wielowarstwową. Struktura wielowarstwowa do pewnego stopnia łagodzi wymagania wobec sterownika poprzez obniżenie napięcia sterującego (do 60-120V).
Każda warstwa produktu firmy TDK tylko nieznacznie rozszerza się w kierunku „z” ze względu na odwrotne zjawisko piezoelektryczne. Ponieważ jednak urządzenie piezoelektryczne musi utrzymywać stałą objętość, warstwy jednocześnie kurczą się w wymiarze „x” i „y”.
Produkt firmy TDK mechanicznie wzmacnia proces kurczenia się za pomocą pary talerzy na obu końcach urządzenia piezoelektrycznego, aby zwiększyć ruch osi „z” o współczynnik 15, osiągając przemieszczenie od 35 do 65µm (mikrometrów) w zależności od modelu (ilustracja 3). Przy obciążeniu 100g (gramów) (praca jednobiegunowa, pojedyncza sinusoida, 200Hz) większy aktuator firmy TDK osiąga przyspieszenie 30g od szczytu do szczytu już po 1ms (milisekundzie). Zakres częstotliwości od 1 do 1000Hz (herców) pozwala projektantom na indywidualne opracowanie profili potwierdzenia haptycznego o wysokiej wyczuwalności.
 Ilustracja 3: piezoelektryczne aktuatory haptyczne firmy TDK wykorzystują wielowarstwową strukturę i talerze do wzmocnienia ruchu na osi „z”. (Źródło obrazu: TDK)
Ilustracja 3: piezoelektryczne aktuatory haptyczne firmy TDK wykorzystują wielowarstwową strukturę i talerze do wzmocnienia ruchu na osi „z”. (Źródło obrazu: TDK)
Aktuatory piezoelektryczne firmy TDK mogą pracować w trybie jednobiegunowym lub dwubiegunowym. W przypadku pracy jednobiegunowej napięcie w aktuatorze jest dodatnie, podczas gdy w przypadku pracy dwubiegunowej zmienia się ono pomiędzy wartościami szczytowymi dodatnimi i ujemnymi. Zaletą trybu dwubiegunowego jest to, że przy tym samym napięciu międzyszczytowym można uzyskać większe przemieszczenie lub uzyskać równe przemieszczenie przy niższym napięciu międzyszczytowym. Minusem jest to, że praca dwubiegunowa zwiększa obciążenia mechaniczne i elektryczne aktuatora (ilustracja 4).
 offers the same mechanical displacement as unipolar") Ilustracja 4: tryb dwubiegunowy (po prawej) oferuje takie samo mechaniczne przemieszczenie co tryb jednobiegunowy, ale wymaga mniejszego napięcia międzyszczytowego. (Źródło obrazu: TDK)
Ilustracja 4: tryb dwubiegunowy (po prawej) oferuje takie samo mechaniczne przemieszczenie co tryb jednobiegunowy, ale wymaga mniejszego napięcia międzyszczytowego. (Źródło obrazu: TDK)
Producenci płytek krzemowych zaprezentowali również niedawno układy scalone sterowników zaprojektowane specjalnie do zastosowań z potwierdzeniem haptycznym. Ulepszone konstrukcje są w stanie wytworzyć szereg trybów wibracji w dobrym zakresie częstotliwości i mogą pracować w trybie jedno- lub dwubiegunowym, gwarantując znacznie większą wydajność niż poprzednie konstrukcje. Przykładem może być piezohaptyczny sterownik BOS1901CQT firmy Boréas Technologies i sterownik mocy silnika DRV2667 firmy Texas Instruments.
Układ scalony firmy Boréas Technologies to jednostrukturowy piezoelektryczny sterownik aktuatora, który wykorzystuje technologię odzyskiwania energii i jest zdolny do generowania wielu sygnałów wibracyjnych. Układ ten może sterować aktuatorami o napięciu międzyszczytowym do 190V ze źródła zasilania 3-5,5V. BOS1901 wykorzystuje szybki szeregowy interfejs urządzeń peryferyjnych (SPI), a wszystkie ustawienia są regulowane przez cyfrowy front-end. Typowy czas rozruchu wynoszący poniżej 300μs (mikrosekund) przekłada się na małe opóźnienia.
Układ firmy Texas Instruments to piezoelektryczny sterownik haptyczny ze zintegrowanym przełącznikiem zasilania 105V i cyfrowym front-endem, który może obsługiwać zarówno aktuatory wysokiego, jak i niskiego napięcia. Cyfrowy front-end odciąża mikroprocesor, eliminując obciążenia związane z generowaniem modulacji szerokości impulsu (PWM) lub potrzebą dodatkowego zapotrzebowania na kanał analogowy w systemie hosta. Układ zawiera pamięć odpowiednią do przechowywania i przywoływania przebiegów fal, a także zaawansowany syntezator przebiegów fal. Typowy czas rozruchu wynoszący 2ms ogranicza opóźnienia, a zabezpieczenie przed przegrzaniem zapobiega uszkodzeniu urządzenia w przypadku przesterowania.
Projekt piezoelektrycznego systemu haptycznego
Zarówno układy firmy Boréas jak i Texas Instruments zostały zaprojektowane do pracy w systemie dotykowym, który zawiera już procesor aplikacji. Procesor wyzwala wykonanie potwierdzenia haptycznego za pomocą SPI. Projektant może również użyć wejścia analogowego do wyzwalania efektów haptycznych (ilustracja 5).
 Ilustracja 5: obwód aplikacji przedstawiający sterownik mocy silnika DRV2667 firmy Texas Instruments. Procesor aplikacji ekranu dotykowego z układem firmy Texas Instruments wyzwala zdarzenia haptyczne, a następnie steruje piezoelektrycznym urządzeniem haptycznym. (Źródło ilustracji: Texas Instruments)
Ilustracja 5: obwód aplikacji przedstawiający sterownik mocy silnika DRV2667 firmy Texas Instruments. Procesor aplikacji ekranu dotykowego z układem firmy Texas Instruments wyzwala zdarzenia haptyczne, a następnie steruje piezoelektrycznym urządzeniem haptycznym. (Źródło ilustracji: Texas Instruments)
Ze względu na poziom integracji najnowszych sterowników, projektowanie systemów ekranów dotykowych z piezoelektrycznym haptycznym sprzężeniem zwrotnym jest prostsze, ale wybór niektórych komponentów jest ważny pod względem optymalizacji osiągów projektu. Na przykład, napięcie zasilające (BST) powinno być o 5V większe niż napięcie szczytowe, które będzie przyłożone do aktuatora piezoelektrycznego. Pozwala to na ustawienie stopnia narzutu wzmacniacza za pomocą sieci rezystorów R1/R2 pokazanej na ilustracji 5.
Wzór na obliczenie wartości rezystora jest następujący: V(BST) = V(FB) x (1 + R1/R2), gdzie V(FB) = 1,32V.
Tak więc, aby osiągnąć na przykład maksimum V(BST) o wartości 105V sterownika firmy Texas Instruments, wartości R1 i R2 mogą wynosić odpowiednio 768kΩ (koloomów) i 9,76kΩ.
Szczytowy prąd zasilający pobierany jest przez zasilacz za pomocą cewki indukcyjnej L1. Prąd ten jest określany przez R(EXT), ale należy zwrócić uwagę, aby wybrać cewkę indukcyjną, która poradzi sobie z zaprogramowanym ograniczeniem prądu (ILIM). Zależność R(EXT) od ILIM określa poniższy wzór:
![]()
Gdzie K = 10500, VREF = 1,35V, RINT (wewnętrzny opór sterownika) = 60Ω, a ILIM = granica prądu szczytowego L1.
Wybór cewki indukcyjnej jest kluczowym elementem zapewnienia najwyższej wydajności pracy sterownika. W przypadku układu firmy Texas Instruments zalecane indukcyjności wynoszą od 3,3 do 22μH ( (mikrohenrów). Należy zastanowić się, czy wybrać wyższą indukcyjność w celu zmniejszenia strat przy przełączaniu przetwornicy podwyższającej napięcie, czy może mniejszą w celu zmaksymalizowania prądu wyjściowego.
Kluczowe parametry elektryczne aktuatora piezohaptycznego w kontekście sterownika to napięcie znamionowe i pojemność. Na przykład przy maksymalnej częstotliwości sterownika firmy Texas Instruments wynoszącej 500Hz, urządzenie jest zoptymalizowane do pojemności do 50nF (nanofaradów) przy napięciu międzyszczytowym wynoszącym 200V(najwyższe napięcie wahadłowe sterownika). Układ może mieć większą pojemność, jeśli zaprogramowane napięcie zasilające zostanie obniżone lub użytkownik ograniczy zakres częstotliwości wejściowych do np. 300Hz.
Innym ważnym wyborem komponentu jest kondensator podwyższający napięcie (C(BST)). Napięcie znamionowe kondensatora musi być co najmniej równe napięciu zasilającemu, a najlepiej jeszcze wyższe. Na przykład, kondensator o napięciu znamionowym 250V i pojemności 100nF typu X5R lub X7R jest zalecany w przypadku pracy przy maksymalnym napięciu zasilania układu firmy Texas Instruments wynoszącym 105V. Minimalna pojemność robocza C(BST) musi wynosić co najmniej 50nF. W przypadku V(BST) wynoszącego od 30 do 80V wystarczy kondensator o napięciu 100V i pojemności 100nF, a jeśli V(BST) wynosi mniej niż 30V, zaleca się kondensator o napięciu 50V i pojemności 0,22μF (mikrofarada).
Ze względu na wymagania wtyku przełącznika dotyczące prądu zaleca się zastosowanie kondensatora masowego (CBULK) umieszczonego obok cewki indukcyjnej. Zaleca się kondensator ceramiczny typu X5R lub X7R o pojemności co najmniej 1μF.
Narzędzia rozwojowe
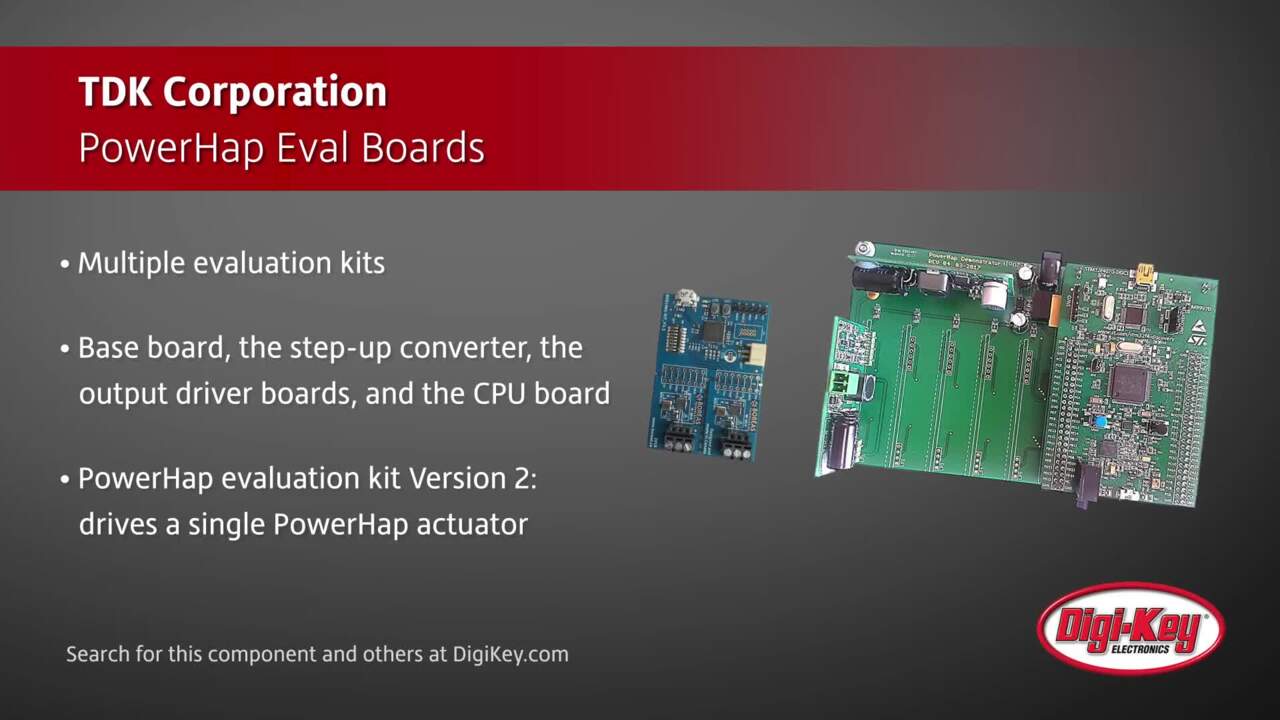
Dla tych inżynierów, którzy chcą eksperymentować z możliwościami piezoelektrycznych siłowników haptycznych firmy TDK zanim zdecydują się na konkretny sprzęt, firma oferuje jednokanałowy zestaw ewaluacyjny Z63000Z2910Z 1Z 1 PowerHap. Zestaw składa się z płytki bazowej, konwertera stopniowego, płytki wyjściowej sterownika i płytki mikrokontrolera.
Do zestawu dołączono oprogramowanie konfiguracyjne, które jest kompatybilne z systemem Windows 7 lub nowszym. Po załadowaniu oprogramowania zestaw podłącza się do komputera za pomocą kabla USB i zasila napięciem 12V (prądu stałego). Następnie oprogramowanie udostępnia interfejs do konfiguracji reakcji haptycznej aktuatora, która ma mieć miejsce po jego naciśnięciu. Interfejs umożliwia konfigurację następujących parametrów sygnału (ilustracja 6):
- Amplituda - od 5 do 100% (115V)
- Dowolna częstotliwość od - 20 do 300 Hz
- Przebieg fali (fala trapezoidalna, prostokątna, piłokształtna)
- Współczynnik wypełnienia przebiegu fali trapezoidalnej - od 35 do 75%
- Liczba impulsów - od 1 do 1000
- Poziom wyzwalania - od 0 do 12V (im niższy poziom wyzwalania, tym mocniej musi być wciśnięty aktuator, aby aktywować sygnał)
- Czas opóźnienia (podczas którego aktuator nie wykrywa siły)
 Ilustracja 6: oprogramowanie zestawu ewaluacyjnego PowerHap firmy TDK przedstawia interfejs konfiguracji sygnału. Następnie można wysłać ustawienia konfiguracji do procesora płytki ewaluacyjnej za pomocą przycisku „Transmit configuration” (Prześlij konfigurację). (Źródło obrazu: TDK)
Ilustracja 6: oprogramowanie zestawu ewaluacyjnego PowerHap firmy TDK przedstawia interfejs konfiguracji sygnału. Następnie można wysłać ustawienia konfiguracji do procesora płytki ewaluacyjnej za pomocą przycisku „Transmit configuration” (Prześlij konfigurację). (Źródło obrazu: TDK)
Oprogramowanie również umożliwia inżynierowi tworzenie niestandardowych przebiegów fal. Po skonfigurowaniu oprogramowania, informacje przesyłane są do procesora zestawu za pomocą kabla USB.
Drugi zestaw ewaluacyjny, PowerHap Z63000Z2910Z1Z44, został specjalnie zaprojektowany dla inżynierów korzystających z piezohaptycznego sterownika BOS1901CQT firmy Boréas. Zestaw ten składa się z płytki bazowej, konwertera stopniowego, dwóch sterowników i mikrokontrolera. Do zestawu podstawowego dołączony jest jeden piezoelektryczny aktuator haptyczny firmy TDK (ilustracja 7).
 Ilustracja 7: zestaw ewaluacyjny Z63000Z2910Z1Z44 PowerHap firmy TDK wykorzystuje piezohaptyczne sterowniki firmy Boréas i jest zgodny z protokołem audio USB, co upraszcza konfigurację. (Źródło obrazu: TDK)
Ilustracja 7: zestaw ewaluacyjny Z63000Z2910Z1Z44 PowerHap firmy TDK wykorzystuje piezohaptyczne sterowniki firmy Boréas i jest zgodny z protokołem audio USB, co upraszcza konfigurację. (Źródło obrazu: TDK)
Płytka podłączana jest do komputera za pomocą kabla USB, wykorzystuje ona standardowy protokół audio USB i pojawia się jako zwykłe wyjście audio do dowolnego komputera. Prototypowanie przebiegu fali (do 190V napięcia międzyszczytowego) i odtwarzanie może być wykonywane przy użyciu protokołu audio USB do prototypowania efektów haptycznych w programach takich jak MATLAB, Python i Audacity.
Podsumowanie
Potwierdzenie haptyczne przy użyciu aktuatorów piezoelektrycznych, ERM i LRA umożliwia lepsze sterowanie za pomocą ekranu dotykowego zarówno w zastosowaniach konsumenckich, jak i przemysłowych. Jednakże obniżanie napięcia sprawiło, że kompaktowe piezoelektryczne aktuatory haptyczne oferują większe korzyści płynące z zastosowania potwierdzenia haptycznego o wysokiej wyczuwalności w urządzeniach z zasilaniem bateryjnym.
Jednocześnie projektowanie piezoelektrycznych systemów haptycznych stało się prostsze dzięki wprowadzeniu odpowiednich sterowników, współpracujących z popularnymi procesorami aplikacyjnymi i oferuje obsługę szerokiej gamy przebiegów fal. Dostępność gotowych zestawów ewaluacyjnych dla tych urządzeń od firm takich jak TDK umożliwia eksperymentowanie i prototypowanie przed przystąpieniem do rzeczywistego projektowania sprzętu.
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.