Szybkie wdrażanie pozycjonujących wielokonstelacyjnych modułów globalnego systemu nawigacji satelitarnej (GNSS)
Przekazane przez: Północnoamerykańscy redaktorzy DigiKey
2021-09-09
Wykorzystanie funkcji opartych na położeniu przy użyciu wielokonstelacyjnych odbiorników globalnego systemu nawigacji satelitarnej (GNSS) dla europejskiego systemu Galileo, amerykańskiego globalnego systemu pozycjonowania (GPS), rosyjskiego systemu GLONASS, chińskiego systemu nawigacji satelitarnej BeiDou i japońskiego systemu QZSS rośnie w wielu zastosowaniach, w tym w robotyce, pojazdach autonomicznych, automatyce przemysłowej, logistyce i śledzeniu aktywów, dronach oraz ciężkim sprzęcie rolniczym i budowlanym. Korzyści z używania wielokonstelacyjnych odbiorników GNSS to między innymi: lepsza dostępność sygnałów pozycjonowania, nawigacji i pomiaru czasu (PNT), zwiększona dokładność i integralność oraz zwiększona niezawodność zastosowań.
Jednak opracowanie odbiorników wielokonstelacyjnych jest złożonym i czasochłonnym zajęciem, które wymaga optymalizacji anteny na pasmo L, zaprojektowania modułu front end o częstotliwości radiowej (RF), integracji algorytmów przetwarzania sygnału pasma podstawowego w celu pozyskiwania, śledzenia i stosowania korekcji do różnych sygnałów pozycjonowania, nawigacji i pomiaru czasu (PNT), kodowania oprogramowania do przetwarzania aplikacji w celu wyodrębnienia danych PNT z każdego kanału pasma podstawowego i wykorzystania informacji do realizacji funkcji systemu. Projektanci muszą również dobrać odpowiednią antenę i prawidłowo ją ulokować.
Alternatywnie projektanci mogą skorzystać z gotowych modułów globalnego systemu nawigacji satelitarnej (GNSS) i środowisk rozwojowych, aby szybko i skutecznie zintegrować w systemie funkcje pozycjonowania. Takie moduły GNSS zawierają moduł front-end, funkcję przetwarzania pasma podstawowego i wbudowane oprogramowanie układowe, które przyspiesza tworzenie oprogramowania do przetwarzania aplikacji. Niektóre moduły GNSS zawierają również anteny.
W niniejszym artykule omówiono podstawy globalnego systemu nawigacji satelitarnej (GNSS), pozycjonowania, nawigacji i pomiaru czasu (PNT) oraz działanie wielokonstelacyjnych odbiorników GNSS. W dalszej części przyjrzano się zaletom i wadom anten zintegrowanych z modułami GNSS, a następnie przedstawiono kilka modułów GNSS - ze zintegrowanymi antenami i bez nich - oraz powiązane płytki ewaluacyjne firm STMicroelectronics, Septentrio, oraz Würth Elektronik, które projektanci mogą wykorzystać w celu wydajnego i ekonomicznego opracowywania dokładnych i niezawodnych rozwiązań opartych na pozycjonowaniu.
Czym jest globalny system nawigacji satelitarnej (GNSS) oraz pozycjonowanie, nawigacja i pomiar czasu (PNT)?
GNSS i PNT są ściśle powiązanymi pojęciami. Satelity GNSS są najczęstszym źródłem sygnałów PNT. Satelity GNSS są zasadniczo bardzo dokładnymi zsynchronizowanymi zegarami, które stale nadają informacje pozycjonowania, nawigacji i pomiaru czasu (PNT). Moduł GNSS odbiera sygnały PNT z danego satelity i oblicza swoją odległość od niego. Jeśli odbiornik zna odległość do co najmniej czterech satelitów, może oszacować własną pozycję. Jednak na dokładność oszacowania pozycji mają wpływ różne źródła błędów, w tym:
- Dryft zegara układu pomiaru czasu w satelitach GNSS
- Nieścisłości w przewidywaniu dokładnej pozycji orbitalnej satelitów GNSS
- Ogólny dryft parametrów działania w ogólnym sprzęcie satelitarnym w stosunku do innych satelitów, inaczej zwanym odchyleniem satelity
- Zniekształcenia i opóźnienia w transmisji sygnału podczas przechodzenia przez jonosferę i troposferę.
- Odbicia wielościeżkowe oraz zmienne parametry działania i dryft w odbiorniku
Dla projektantów dostępne są różne techniki korygowania błędów satelitarnych i atmosferycznych GNSS.
Poprawa parametrów działania globalnego systemu nawigacji satelitarnej (GNSS)
Najlepszym sposobem na zminimalizowanie wpływu błędów pochodzących z odbiornika GNSS jest użycie odbiornika o najwyższych parametrach, który wpisuje się w założenia budżetowe i rozmiarowe danego zastosowania. Jednak nawet odbiorniki o wysokich parametrach wydajności nie są doskonałe; ich parametry można najprawdopodobniej jeszcze poprawić. Ważne jest, aby zrozumieć metody korekcji, ponieważ mają one różne parametry, a w niektórych modułach GNSS nie da się zaimplementować ich wszystkich.
W kilku metodach korekcji GNSS wykorzystuje się naziemne stacje referencyjne (ilustracja 1). Najbardziej znanymi metodami wykorzystywania naziemnych stacji referencyjnych do korekcji błędów globalnego systemu nawigacji satelitarnej (GNSS) w odbiornikach jest kinematyka czasu rzeczywistego (RTK) i precyzyjne pozycjonowanie punktowe (PPP). Niedawno pojawiły się hybrydowe metody RTK-PPP.
 Ilustracja 1: odbiornik użytkownika GNSS jest w stanie pozyskiwać informacje o błędach atmosfery, zegara i orbity z sieci referencyjnej, aby poprawić dokładność pozycjonowania. (Źródło ilustracji: Septentrio)
Ilustracja 1: odbiornik użytkownika GNSS jest w stanie pozyskiwać informacje o błędach atmosfery, zegara i orbity z sieci referencyjnej, aby poprawić dokładność pozycjonowania. (Źródło ilustracji: Septentrio)
Metoda kinematyki czasu rzeczywistego (RTK) opiera się na pojedynczej stacji bazowej lub lokalnej sieci referencyjnej dla danych korekcyjnych, które mogą wyeliminować większość błędów GNSS. Założeniem w metodzie RTK jest niewielka odległość stacji bazowej od odbiornika - maksymalnie 40 kilometrów lub 25 mil - na skutek czego w obu tych punktach występują te same błędy. Kinematyka postprocesowana czy też PPK to odmiana RTK i jest szeroko stosowana w geodezji i mapowaniu w celu uzyskania bardzo precyzyjnych danych pozycjonowania lub precyzji rzędu centymetrów.
Do wykonania korekcji precyzyjnego pozycjonowania punktowego (PPP) wykorzystywane są tylko błędy zegara orbity i zegara satelitarnego. Te specyficzne dla satelity błędy są niezależne od lokalizacji użytkownika, co ogranicza liczbę potrzebnych stacji referencyjnych. Jednak w metodzie PPP nie uwzględnia się błędów związanych z atmosferą i dlatego ma ona mniejszą dokładność w porównaniu z metodą RTK. Ponadto korekcje PPP mogą mieć czas inicjalizacji wynoszący około 20 minut. Dłuższy czas inicjalizacji i mniejsza dokładność sprawiają, że metoda PPP jest w wielu zastosowaniach niepraktyczna.
Zastosowania wymagające dokładności bliskiej metodzie RTK i szybkiego czasu inicjalizacji często wykorzystują najnowszą usługę korekcji GNSS, RTK-PPP (czasami określaną jako równanie stanów (SSR)). Wykorzystuje ona sieć referencyjną ze stacjami oddalonymi od siebie o około 100km (65 mil), która zbiera dane GNSS i oblicza kombinację korekcji satelitarnych i atmosferycznych. Sieć referencyjna wykorzystuje sieci internetowe, satelitarne lub komórkowe do wysyłania danych korekcyjnych do abonentów. Odbiorniki GNSS korzystające z metody RTK-PPP mogą charakteryzować się dokładnością poniżej decymetra. Wybór metody korekcji spośród RTK, PPP i RTK-PPP wiąże się z szeregiem kompromisów projektowych, które deweloperzy muszą przejrzeć, aby wybrać optymalne rozwiązanie dla określonego profilu zastosowania. (Ilustracja 2).
 Ilustracja 2: zalety i wady trzech popularnych metod korekcji GNSS. (Źródło ilustracji: Septentrio)
Ilustracja 2: zalety i wady trzech popularnych metod korekcji GNSS. (Źródło ilustracji: Septentrio)
Systemy wspomagania satelitarnego (SBAS) zaczynają być dostępne w skali regionalnej, aby zastąpić metody korekcji oparte na stacjach naziemnych RTK, PPP i RTK-PPP. Systemy SBAS nadal używają stacji naziemnych do pomiaru błędów GNSS, ale stacje są rozmieszczone na całych kontynentach. Zmierzone błędy są przetwarzane w centralnej lokalizacji, gdzie korekcje są obliczane i przesyłane do satelitów geosynchronicznych na pokrytym obszarze. Dane korekcyjne są nadawane z satelitów jako nakładka lub uzupełnienie oryginalnych danych GNSS.
Dokładność globalnego systemu nawigacji satelitarnej (GNSS) zależy od dostępności i dokładności pomiarów satelitarnych i związanych z nimi korekcji. Odbiorniki GNSS o wysokich parametrach śledzą sygnały GNSS na wielu częstotliwościach i wykorzystują wiele konstelacji GNSS oraz różne metody korekcji, aby zapewnić wymaganą dokładność i odporność. Uzyskana redundancja umożliwia stabilne działanie, nawet jeśli niektóre pomiary satelitarne i dane są zakłócane. Projektanci mogą wybierać spośród różnych możliwości zapewnienia dokładności i redundancji GNSS (ilustracja 3).
 Ilustracja 3: klasy dokładności GNSS z odpowiednimi metodami korekcji i wybranymi zastosowaniami. (Źródło ilustracji: Septentrio)
Ilustracja 3: klasy dokładności GNSS z odpowiednimi metodami korekcji i wybranymi zastosowaniami. (Źródło ilustracji: Septentrio)
Moduły GNSS: anteny zintegrowane a anteny zewnętrzne
Ze względu na złożoność pozycjonowania wielokonstelacyjnego dostępne są moduły od różnych dostawców, które pomagają przyspieszyć czas wprowadzania na rynek, obniżyć koszty i zapewnić parametry działania. Pomimo tego projektanci muszą rozważyć, czy użyć anteny wewnętrznej, czy zamiast tego wybrać taką, która znajduje się poza modułem GNSS. W przypadku zastosowań, w których priorytetem jest czas wprowadzenia na rynek i koszty, preferowana może być antena zintegrowana, ponieważ w grę wchodzi znaczne ograniczenie prac inżynieryjnych. W przypadku zastosowań wymagających certyfikacji FCC lub CE zastosowanie modułu ze zintegrowaną anteną może również przyspieszyć proces uzyskiwania aprobat. Jednak w przypadku anten zintegrowanych rozmiar rozwiązania może być większy, a elastyczność ograniczona.
Anteny zewnętrzne zapewniają projektantom szerszy zakres opcji parametrów działania i układów. Można wybrać dużą antenę o wysokich parametrach lub mniejszą antenę o parametrach niższych. Ponadto umieszczenie anteny jest bardziej elastyczne w stosunku do lokalizacji modułu GNSS, co dodatkowo zwiększa elastyczność projektowania. Dzięki elastyczności rozmieszczenia anteny zewnętrzne zapewniają bardziej niezawodne działanie globalnego systemu nawigacji satelitarnej (GNSS). Jednak rozmieszczenie anteny i trasowanie połączeń może być złożonym i czasochłonnym procesem i wymaga szczególnej wiedzy, potencjalnie zwiększając koszty i spowalniając czas wprowadzania na rynek.
Mały moduł GNSS do projektów o ograniczonej przestrzeni
Zespoły projektowe posiadające wymaganą wiedzę specjalistyczną w zakresie rozmieszczania i trasowania anten mogą korzystać z technologii Teseo-LIV3F firmy STMicroelectronics, czyli wielokonstelacyjnego modułu GNSS (GPS/Galileo/GLONASS/BeiDou/QZSS) wykorzystującego antenę zewnętrzną (ilustracja 4). Moduł jest dostarczany w obudowie LCC-18 o wymiarach 9,7mm x 10,1mm i charakteryzuje się dokładnością pozycji z błędem kołowym prawdopodobnym (CEP) na poziomie 1,5m. Czas pierwszego ustalenia pozycji (TTFF) dla zimnego i gorącego startu wynosi odpowiednio poniżej 32s i poniżej 1,5s (GPS, GLONASS). Pobór mocy w trybie czuwania wynosi 17µW i 75mW podczas śledzenia.
 Ilustracja 4: moduł GNSS Tesco-LIV3F zawiera rdzeń i podsystemy GNSS, a także wszystkie niezbędne elementy do zapewnienia łączności i zarządzania energią w obudowie o wymiarach 9,7 x 10,1mm. Wymagana jest antena zewnętrzna. (Źródło ilustracji, STMicroelectronics)
Ilustracja 4: moduł GNSS Tesco-LIV3F zawiera rdzeń i podsystemy GNSS, a także wszystkie niezbędne elementy do zapewnienia łączności i zarządzania energią w obudowie o wymiarach 9,7 x 10,1mm. Wymagana jest antena zewnętrzna. (Źródło ilustracji, STMicroelectronics)
Wbudowany w moduł Tesco-LIV3F oscylator krystaliczny z kompensacją temperatury (TCXO) o częstotliwości 26MHz pomaga zapewnić wysoką dokładność, a dedykowany oscylator zegara czasu rzeczywistego (RTC) o częstotliwości 32kHz umożliwia skrócenie czasu pierwszego ustalenia pozycji (TTFF). Funkcje, takie jak rejestracja danych, siedmiodniowa autonomiczna rekonfiguracja oprogramowania układowego wspomagana systemu GNSS, a także aktualizacje oprogramowania układowego, są dostępne dzięki wbudowanej pamięci flash 16Mb.
Moduł Tesco-LIV3F jest odpowiedni do zastosowań w ubezpieczeniach, logistyce, dronach, pobieraniu opłat, systemach antykradzieżowych, lokalizacji ludzi i zwierząt, śledzeniu pojazdów i połączeniach alarmowych.
Jako rozwiązanie wstępnie certyfikowane, użycie modułu Teseo-LIV3F może skutkować skróceniem czasu wprowadzenia finalnego produktu na rynek. Posiada zakres temperatur pracy od -40°C do +85°C.
W celu eksperymentowania z modułem i przyspieszenia tworzenia zastosowań, projektanci mogą wykorzystać płytkę ewaluacyjną AEK-COM-GNSST31. W połączeniu z oprogramowaniem układowym X-CUBE-GNSS1 pakiet ewaluacyjny może obsługiwać funkcje akwizycji, śledzenia, nawigacji i wyprowadzania danych bez pamięci zewnętrznej. Ta płytka ewaluacyjna jest również przeznaczona do użytku z mikrokontrolerem SPC5 w celu tworzenia rozwiązań motoryzacyjnych.
Moduł GNSS z eliminacją zakłóceń
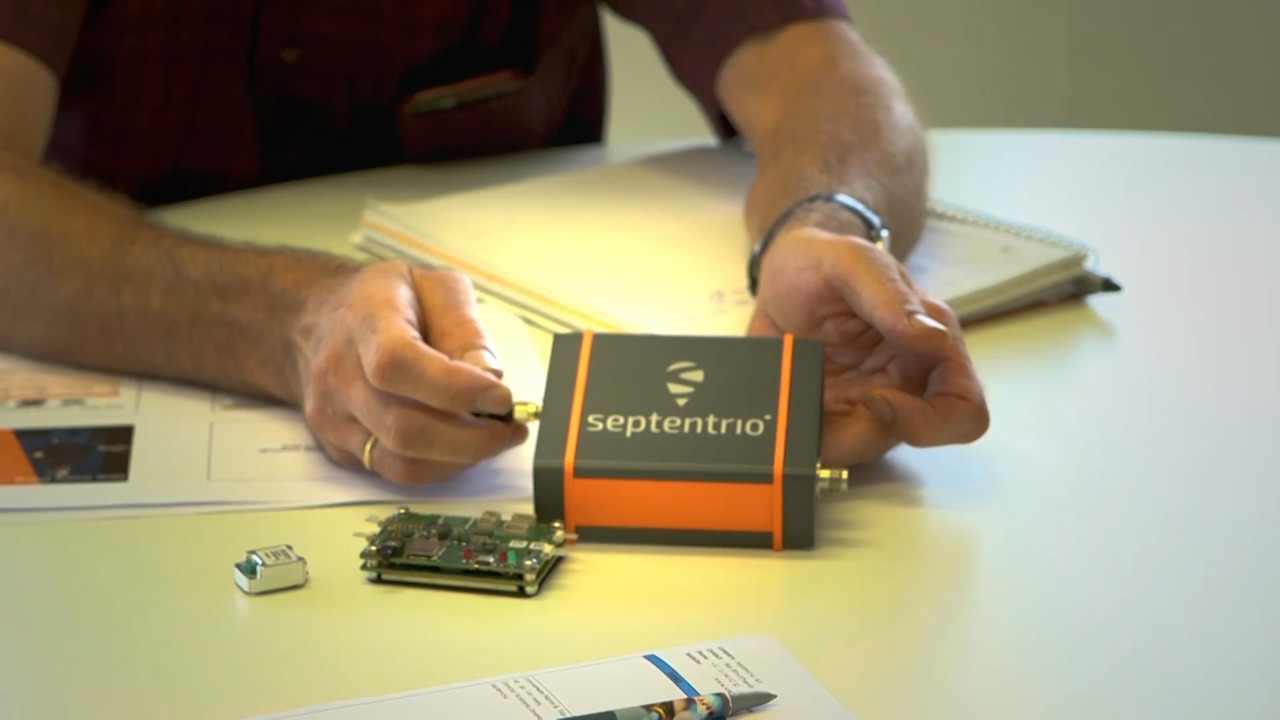
Odbiornik wielokonstelacyjny GNSS mosaic-X5 410322 firmy Septentrio jest modułem do montażu powierzchniowego o niskim poborze mocy i wymiarach 31mm x 31mm x 4mm, który zapewnia projektantom szereg interfejsów, w tym cztery złącza UART, Ethernet, USB, SDIO i dwa programowalne złącza GPIO.
Zaprojektowany do użytku w robotyce, systemach autonomicznych i innych zastosowaniach na rynku masowym, odbiornik mosaic-X5 charakteryzuje się częstotliwością aktualizacji 100Hz z latencją poniżej 10ms oraz dokładnością pozycjonowania RTK w pionie i poziomie odpowiednio 0,6cm i 1cm. Może śledzić wszystkie konstelacje GNSS, obsługując obecne i przyszłe sygnały oraz jest kompatybilny z metodami korekcji PPP, SSR, RTK i SBAS. Czas pierwszego ustalenia pozycji (TTFF) modułu wynosi poniżej 45s przy zimnym starcie i poniżej 20s przy ciepłym starcie.
Odbiornik mosaic-X5 zawiera kilka opatentowanych technologii Septentrio, w tym AIM, czyli wbudowaną technologię eliminacji zakłóceń, która tłumi różne zakłócenia, od prostych ciągłych sygnałów wąskopasmowych po złożone blokady szerokopasmowe i impulsowe.
Interfejsy, polecenia i komunikaty danych modułów są w pełni udokumentowane. Dołączone oprogramowanie RxTools umożliwia konfigurację i monitorowanie odbiornika, a także rejestrowanie i analizę danych.
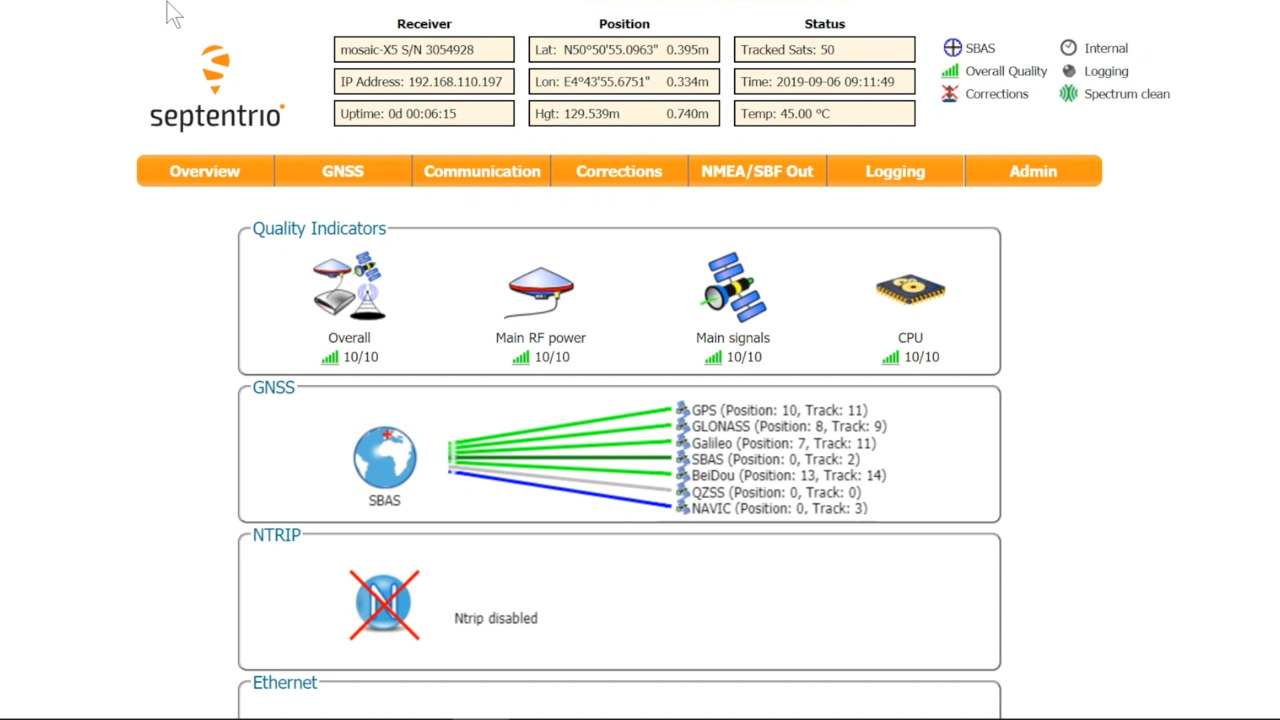
Zestaw rozwojowy mosaic-X5 410331P3161 firmy Septentrio umożliwia projektantom badanie, ocenę i opracowywanie prototypów, które w pełni wykorzystują możliwości odbiornika mosaic-X5 (ilustracja 5).
 Ilustracja 5: projektanci mogą stworzyć prototyp przy użyciu zestawu rozwojowego mosaic-X5 410331P3161, korzystając z różnych połączeń, w tym portów Ethernet, COM lub USB 2.0, lub przy użyciu karty pamięci SD. (Źródło ilustracji: Septentrio)
Ilustracja 5: projektanci mogą stworzyć prototyp przy użyciu zestawu rozwojowego mosaic-X5 410331P3161, korzystając z różnych połączeń, w tym portów Ethernet, COM lub USB 2.0, lub przy użyciu karty pamięci SD. (Źródło ilustracji: Septentrio)
Zestaw wykorzystuje intuicyjny sieciowy interfejs użytkownika odbiornika mosaic-X5, zapewniając łatwą obsługę oraz monitorowanie i umożliwiając projektantom sterowanie modułem odbiornika z dowolnego urządzenia mobilnego lub komputera. Interfejs sieciowy wykorzystuje łatwe do odczytania wskaźniki jakości do monitorowania pracy odbiornika.
Projektanci mogą stworzyć prototyp poprzez zintegrowanie zestawu rozwojowego mosaic przy użyciu dowolnego z następujących połączeń: porty Ethernet, COM, USB 2.0, karta pamięci SD.
Moduł GNSS ze zintegrowaną anteną
Dla projektantów, którzy mogą skorzystać na zastosowaniu modułu GNSS ze zintegrowaną anteną, firma Würth Elektronik oferuje moduł Erinome-I 2614011037000 z wysokowydajnym układem SoC (ilustracja 6). Moduł obsługuje konstelacje GNSS systemów GPS, GLONASS, Galileo i BeiDou i jest wyposażony w zintegrowaną antenę na górze, która upraszcza integrację sprzętu i skraca czas wprowadzania na rynek. Moduł wraz ze zintegrowaną anteną ma wymiary 18mm x 18mm.
 Ilustracja 6: kompletny moduł GNSS Erinome-I 2614011037000 z wysokowydajnym układem SoC GNSS oraz zintegrowaną anteną. (Źródło ilustracji: Würth Elektronik)
Ilustracja 6: kompletny moduł GNSS Erinome-I 2614011037000 z wysokowydajnym układem SoC GNSS oraz zintegrowaną anteną. (Źródło ilustracji: Würth Elektronik)
Moduł zawiera również oscylator krystaliczny z kompensacją temperatury (TCXO), filtr częstotliwości radiowych (RF), wzmacniacz niskoszumowy (LNA) i szeregową pamięć flash.
Firma Würth oferuje również płytkę ewaluacyjną (EVB) 2614019037001 do modułu Erinome-I (ilustracja 7). Płytka ewaluacyjna może również służyć jako projekt referencyjny do integracji modułu GNSS w żądanym zastosowaniu. Do połączenia płytki ewaluacyjnej z komputerem można wykorzystać port USB. Dostęp do wszystkich wtyków modułu GNSS zapewnia projektantom złącze wielowtykowe.
 Ilustracja 7: płytka ewaluacyjna 2614019037001 dla modułu Erinome-I (w pobliżu środka płytki, ze zintegrowaną anteną widoczną w środku modułu) działa również jako projekt referencyjny. (Źródło ilustracji: Würth Elektronik)
Ilustracja 7: płytka ewaluacyjna 2614019037001 dla modułu Erinome-I (w pobliżu środka płytki, ze zintegrowaną anteną widoczną w środku modułu) działa również jako projekt referencyjny. (Źródło ilustracji: Würth Elektronik)
Oprogramowanie Würth Elektronik Navigation and Satellite Software (WENSS) jest prostym narzędziem na komputery PC, służącym do interakcji z modułem Erinome-I GNSS za pomocą interfejsu UART. Obsługiwane są:
- Kontrola działania płytki ewaluacyjnej
- Dwukierunkowa komunikacja z modułem Erinome-I
- Ewaluacja funkcji i możliwości modułu Erinome-I
- Zapoznanie się z protokołami, zdaniami i poleceniami w module Erinome-I
- Konfiguracja modułu Erinome-I bez znajomości protokołów
- Analiza zdań i poleceń używanych przez moduł Erinome-I
Oprogramowanie WENSS umożliwia łatwą ocenę rozwiązań w zakresie pozycjonowania bez zaawansowanej wiedzy. Doświadczeni deweloperzy mogą również używać oprogramowania WENSS do bardziej zaawansowanych konfiguracji.
Podsumowanie
Dokładne i niezawodne pozycjonowanie osiąga się najlepiej przy użyciu wielu konstelacji z powiązanym wsparciem technologii korekcji. Są to złożone systemy, ale projektanci mogą skorzystać z gotowych modułów GNSS, powiązanych zestawów rozwojowych oraz środowisk, aby szybko i skutecznie porównywać opcje oraz wdrażać funkcje i usługi oparte na położeniu.
Rekomendowane artykuły
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.