Rozwiązywanie problemów związanych z szumami, sprawnością i rozmieszczeniem komponentów w regulatorach prądu stałego za pomocą zintegrowanych modułów zasilania
Przekazane przez: Północnoamerykańscy redaktorzy DigiKey
2022-10-06
Budowa podstawowego regulatora obniżającego prądu stałego dla niskich napięć 10V (typ.) lub mniejszych i umiarkowanych poziomów natężenia prądu od około 2 do 15A nie wydaje się trudna. Wystarczy, że projektant po prostu wybierze odpowiedni układ scalony regulatora i doda kilka elementów biernych, korzystając z przykładowego obwodu z arkusza danych lub dokumentu uwag dotyczących zastosowań. Ale czy taki projekt jest naprawdę skończony i gotowy do rozpoczęcia fazy pilotażowej, a nawet produkcyjnej? Prawdopodobnie nie.
Mimo że regulator zapewnia żądaną szynę prądu stałego, nadal może borykać się z kilkoma problemami i niedociągnięciami. Po pierwsze sprawność może nie być zgodna z założeniami projektowymi lub wymaganiami prawnymi, co spowoduje zwiększenie temperatury urządzenia, a także skróci czas pracy baterii. Po drugie, aby zapewnić prawidłowe uruchamianie, parametry działania w stanach nieustalonych i niskie tętnienia, mogą być potrzebne dodatkowe komponenty, co z kolei wpływa na rozmiary produktu, czas jego wprowadzenia na rynek oraz wykaz materiałów (BOM). Ostatnim problemem, prawdopodobnie najtrudniejszym do rozwiązania, jest zagrożenie, że projekt nie będzie spełniać coraz bardziej surowych ograniczeń w zakresie zakłóceń elektromagnetycznych (EMI) lub zakłóceń o częstotliwościach radiowych (RFI), określonych w różnych przepisach, co może wymagać przebudowy lub zastosowania dodatkowych komponentów i przeprowadzenia testów.
W niniejszym artykule opisano różnicę między oczekiwaniami a parametrami działania dla regulatora prądu stałego o konstrukcji podstawowej i zaawansowanej, która spełnia lub przekracza wymagania w zakresie parametrów działania, niskiego poziomu szumów promieniowanych i tętnień oraz ogólnej integracji. W artykule przedstawiono moduły µModule Silent Switcher firmy Analog Devices oraz sposoby ich wykorzystania do rozwiązywania wielu problemów z regulatorami obniżającymi prądu stałego.
Dzięki układom scalonym sprawa na początku wydaje się łatwa
Regulatory obniżające prądu stałego są powszechnie stosowane do zasilania szyn prądu stałego. W typowym układzie mogą znajdować się dziesiątki takich urządzeń zasilających wiele szyn o różnych napięciach lub fizycznie oddzielonych szyn o tym samym napięciu. Omawiane regulatory obniżające zwykle pobierają wyższe napięcie, zazwyczaj od 5 do 36V= i regulują je do wartości rzędu jednego wolta przy natężeniu rzędu kilku lub kilkunastu amperów (ilustracja 1).
") Ilustracja 1: rola regulatora (przetwornicy) prądu stałego jest prosta: pobrać nieregulowany prąd stały ze źródła, np. z baterii lub prostowanej i filtrowanej linii prądu zmiennego oraz zapewnić ściśle regulowaną szynę wyjściową prądu stałego. (Źródło ilustracji: Electronic Clinic)
Ilustracja 1: rola regulatora (przetwornicy) prądu stałego jest prosta: pobrać nieregulowany prąd stały ze źródła, np. z baterii lub prostowanej i filtrowanej linii prądu zmiennego oraz zapewnić ściśle regulowaną szynę wyjściową prądu stałego. (Źródło ilustracji: Electronic Clinic)
Jeśli chodzi o konstruowanie podstawowego regulatora obniżającego, jest dobra i zła wiadomość. Dobrą jest to, że stworzenie takiego, który zapewni nominalnie „wystarczająco dobre” wyniki, nie jest na ogół trudne. W większości zadań dostępnych jest wiele przełączających układów scalonych, które do wykonania zadania wymagają tylko jednego tranzystora polowego (FET) (lub nie wymagają ich wcale) i kilku elementów biernych. Zadanie jest jeszcze łatwiejsze, ponieważ arkusz danych dla układu scalonego regulatora niemal zawsze pokazuje typowy obwód do tego zastosowania ze schematem, układem płytki i wykazem materiałów (BOM), w którym można znaleźć nazwy dostawców komponentów i numery części.
Dylemat inżynieryjny polega na tym, że „dobry” poziom parametrów działania może nie być wystarczający w odniesieniu do niektórych nieoczywistych parametrów regulatora. Chociaż wyjściowa szyna prądu stałego może dostarczać wystarczająco wysoki prąd z odpowiednią regulacją linii/obciążenia i odpowiedzią impulsową, czynniki te są tylko początkiem historii dla szyn zasilających.
W rzeczywistości oprócz tych podstawowych kryteriów działania, regulator ocenia się również według innych czynników. Niektóre z nich są czynnikami zewnętrznymi. Trzy krytyczne kwestie, które trzeba wziąć pod uwagę dla większości regulatorów, niekoniecznie są oczywiste z uproszczonego punktu widzenia bloku funkcjonalnego, który na wejściu ma nieregulowany prąd stały, a na wyjściu regulowany. Oto one (ilustracja 2):
- Niska temperatura: wysoka sprawność i związane z nią minimalne oddziaływanie termiczne.
- Niski poziom szumów: niski poziom tętnień zapewniający bezbłędne działanie układu plus niski poziom zakłóceń elektromagnetycznych (EMI) w celu spełnienia norm w zakresie emitowanych szumów (innych niż akustyczne).
- Kompletność: zintegrowane rozwiązanie, które ogranicza do minimum rozmiar, ryzyko, wykaz materiałów (BOM), czas wprowadzania produktu na rynek i inne „miękkie” problemy.
 Ilustracja 2: nie wystarczy, aby regulator prądu stałego tylko zapewniał stabilizację szyny zasilającej. Musi również charakteryzować się sprawnością, niską temperaturą, niskimi szumami elektromagnetycznymi (EMI) oraz funkcjonalną kompletnością. (Źródło ilustracji: Math.stackexchange.com; zmodyfikowana przez autora)
Ilustracja 2: nie wystarczy, aby regulator prądu stałego tylko zapewniał stabilizację szyny zasilającej. Musi również charakteryzować się sprawnością, niską temperaturą, niskimi szumami elektromagnetycznymi (EMI) oraz funkcjonalną kompletnością. (Źródło ilustracji: Math.stackexchange.com; zmodyfikowana przez autora)
Rozwiązanie tych problemów wiąże się z szeregiem wyzwań, a sam proces może być frustrujący. Jest to zgodne z „zasadą 80/20”, w której na realizację ostatnich 20% zadania poświęca się 80% wysiłku. Bardziej szczegółowe spojrzenie na trzy czynniki:
Niska temperatura: każdy projektant chce jak najwyższej sprawności, ale jak wysokiej i przy jakim koszcie? Odpowiedź jest zwykle jedna: to zależy od projektu i ewentualnych kompromisów. Wyższa sprawność jest ważna z trzech istotnych powodów:
- Przekłada się na niższą temperaturę produktu, co oznacza większą niezawodność, możliwość stosowania w środowiskach o wyższej temperaturze, możliwość wyeliminowania potrzeby stosowania wymuszonego chłodzenia powietrzem (wentylatora) lub możliwość uproszczenia konfiguracji skutecznego układu chłodzenia konwekcyjnego, o ile jest to wykonalne. Co istotne, może być konieczna do utrzymania temperatury określonych mocno nagrzewających się komponentów w bezpiecznym zakresie roboczym poniżej maksymalnej dopuszczalnej temperatury.
- Nawet jeśli wspomniane czynniki termiczne nie są problemem, sprawność przekłada się na dłuższy czas pracy układów zasilanych z baterii lub mniejsze obciążenie dla znajdującej się wcześniej w instalacji przetwornicy prądu zmiennego na stały.
- Obecnie istnieje wiele norm regulacyjnych określających konkretne poziomy sprawności dla produktów końcowych różnych klas. Mimo że normy te nie wskazują sprawności dla poszczególnych szyn w produkcie, projektant stoi wobec wyzwania polegającego na zapewnieniu, że ogólna łączna sprawność spełnia wymogi. Jest to łatwiejsze, gdy regulatory prądu stałego poszczególnych szyn mają większą sprawność, ponieważ dzięki temu mamy zapewniony margines w ogólnym rozrachunku z innymi szynami i innymi źródłami strat.
Niskie szumy: istnieją dwie szerokie klasy szumów, które zajmują projektantów. Po pierwsze, szumy i tętnienia na wyjściu regulatora prądu stałego muszą być wystarczająco niskie, aby nie wpływały negatywnie na parametry działania układu. Jest to coraz większy problem, ponieważ napięcia szyny w obwodach cyfrowych spadają do wartości jednocyfrowych, a z kolei w precyzyjnych obwodach analogowych tętnienia rzędu nawet kilku miliwoltów mogą pogarszać parametry działania.
Inne poważne obawy związane są z zakłóceniami elektromagnetycznymi (EMI). Istnieją dwa rodzaje zakłóceń elektromagnetycznych (EMI): przewodzone i promieniowane. Zakłócenia przewodzone są przenoszone przez przewody i ścieżki, które łączą się z produktem. Ponieważ szumy są zlokalizowane na określonych zaciskach lub złączach w projekcie, zgodność z wymogami w zakresie zakłóceń przewodzonych można często zapewnić stosunkowo wcześnie w procesie projektowania, stosując dobre rozmieszczenie komponentów i odpowiedni filtr.
Emisje promieniowane są jednak bardziej skomplikowane. Każda żyła na płytce drukowanej, która przewodzi prąd, generuje promieniowane pole elektromagnetyczne: każda ścieżka na płytce jest anteną, a każde pole miedzi jest zwierciadłem. Wszystko inne niż czysta fala sinusoidalna lub napięcie prądu stałego generuje sygnał o szerokim widmie.
Trudność polega na tym, że nawet przy zachowaniu staranności projektant nigdy nie wie, jakie będą zakłócenia promieniowane do czasu przetestowania układu, a badań emisji promieniowania nie da się formalnie łatwo przeprowadzić, dopóki projekt nie będzie zasadniczo kompletny. Do redukcji zakłóceń elektromagnetycznych poprzez ich tłumienie przy określonych częstotliwościach lub w określonym zakresie częstotliwości służą filtry wykorzystujące różne techniki.
Część energii promieniowanej w przestrzeń jest tłumiona za pomocą blachy pełniącej rolę ekranu magnetycznego. Niższe częstotliwości, które są przenoszone po ścieżkach płytki drukowanej (zakłócenia przewodzone), ogranicza się poprzez użycie elementów ferrytowych i innych filtrów. Ekranowanie działa, ale stwarza inne problemy. Musi być dobrze zaprojektowane. Jego integralność elektromagnetyczna musi być dobra (co jest często zaskakująco trudne). Powoduje dodatkowe koszty, zwiększa rozmiary rozwiązania, utrudnia odprowadzanie ciepła i testowanie oraz generuje dodatkowe koszty montażu.
Inną techniką jest złagodzenie zboczy przełączania regulatora. Ta technika ma jednak niepożądane skutki, takie jak obniżenie sprawności, wydłużenie minimalnego czasu włączenia i wyłączenia, a także wymaganego czasu martwego, jak również ograniczenie prędkości pętli regulacji prądu.
Jeszcze innym podejściem jest dostosowanie konstrukcji regulatora w celu zmniejszenia promieniowania elektromagnetycznego poprzez staranny dobór kluczowych parametrów konstrukcyjnych. Zadanie określenia odpowiedniego kompromisu pomiędzy parametrami regulatora, takimi jak częstotliwość przełączania, zajmowana powierzchnia, sprawność i generowane zakłócenia elektromagnetyczne (EMI), polega na ocenie ich interakcji.
Na przykład niższa częstotliwość przełączania zmniejsza zazwyczaj straty przełączania i zakłócenia elektromagnetyczne (EMI), a także poprawia sprawność, jednak wymaga większych komponentów, co powoduje zwiększenie zajmowanej powierzchni. Dążeniu do wyższej sprawności towarzyszą niskie minimalne czasy włączenia i wyłączenia, co podwyższa zawartość harmonicznych wynikającą z szybszych operacji przełączania. Ogólnie rzecz biorąc, przy każdym podwojeniu częstotliwości przełączania zakłócenia elektromagnetyczne (EMI) powiększają się o 6dB, przy założeniu, że wszystkie pozostałe parametry, takie jak zdolność przełączania i czasy przejścia pozostają bez zmian. Gdy częstotliwość przełączania wzrasta dziesięciokrotnie, szerokopasmowe zakłócenia elektromagnetyczne (EMI) zachowują się jak filtr górnoprzepustowy pierwszego rzędu o emisji wyższej o 20dB.
Aby temu przeciwdziałać, doświadczeni projektanci płytek drukowanych mogą zastosować małe pętle prądowe regulatora („gorące pętle”) i warstwy ekranujące możliwie najbliżej warstwy aktywnej. Niemniej o pewnym minimalnym rozmiarze gorących pętli decyduje układ wtyków, konstrukcja i rozmiar obudowy oraz temperaturowe wymagania projektowe niezbędne do odpowiedniego magazynowania energii w elementach odsprzęgających.
Typowa płaska płytka drukowana charakteryzuje się sprzężeniem magnetycznym lub transformatorowym pomiędzy ścieżkami o częstotliwości powyżej 30MHz, co jeszcze bardziej komplikuje problem z rozmieszczeniem komponentów. Wspomniane sprzężenie pogarsza efekty filtrowania, ponieważ im wyższe częstotliwości harmonicznych, tym silniejsze niepożądane sprzężenie magnetyczne.
Jakie normy mają tu zastosowanie?
W świecie zakłóceń elektromagnetycznych (EMI) nie istnieje jedna norma przewodnia, ponieważ są one w dużej mierze zależne od zastosowań i obowiązujących przepisów. Wśród najczęściej cytowanych norm są EN55022, CISPR 22 i CISPR 25. Norma EN 55022 jest zmodyfikowaną pochodną normy CISPR 22 i ma zastosowanie do sprzętu informatycznego. Norma ta jest wydawana przez CENELEC, Europejski Komitet Normalizacji Elektrotechnicznej, który odpowiada za standaryzację w dziedzinie elektrotechniki.
Wspomniane normy są skomplikowane i definiują procedury badania, sondy, oprzyrządowanie, analizę danych i wiele innych. Spośród wielu ograniczeń definiowanych przez normę, projektantów często najbardziej interesuje wartość graniczna emisji promieniowanych klasy B.
Kompletność: nawet jeśli sytuacja projektowa jest dość dobrze zrozumiana, dobór i wykorzystanie potrzebnych komponentów dodatkowych we właściwy sposób stanowi wyzwanie. Niewielkie różnice w rozmieszczeniu komponentów, ich specyfikacjach, uziemieniu i ścieżkach na płytce drukowanej oraz innych czynnikach mogą negatywnie wpływać na parametry działania.
Modelowanie i symulacja są konieczne i mogą pomóc, ale bardzo trudno jest scharakteryzować zjawiska pasożytnicze związane z tymi komponentami, zwłaszcza jeśli ich wartości są zmienne. Ponadto zmiana dostawcy (lub wprowadzenie bez uprzedzenia zmian przez preferowanego dostawcę) może wywołać nieznaczne przesunięcie wartości parametrów drugiego lub trzeciego poziomu (np. rezystancji dla prądu stałego), co może mieć znaczące i nieprzewidywalne konsekwencje.
Co więcej, nawet niewielkie zmiany położenia komponentów pasywnych lub dodanie kolejnego komponentu może zmienić scenariusz zakłóceń elektromagnetycznych (EMI) i spowodować przekroczenie dopuszczalnych limitów emisji.
Rozwiązaniem problemów są moduły µModule Silent Switcher
Przewidywanie zagrożeń i zarządzanie nimi jest normalną częścią pracy projektanta. Zmniejszenie liczby i intensywności tych zagrożeń jest standardową strategią przy opracowywaniu produktu końcowego. Rozwiązaniem jest zastosowanie funkcjonalnie kompletnego regulatora prądu stałego, który dzięki dobrej konstrukcji i wdrożeniu będzie charakteryzować się niską temperaturą, niskim poziomem szumów i kompletnością. Użycie znanego urządzenia zmniejsza niepewność przy jednoczesnym wyeliminowaniu zagrożeń związanych z rozmiarami, kosztami, zakłóceniami elektromagnetycznymi, wykazem materiałów (BOM) i montażem. Przyspiesza to również wprowadzanie produktów na rynek i zmniejsza niepokój dotyczący zgodności z przepisami.
Dzięki ofercie całej grupy tego typu regulatorów, takich jak na przykład moduły µModules Silent Switcher firmy Analog Devices, projektanci mogą wybrać regulator prądu stałego dostosowany do wymaganej wartości napięcia i natężenia prądu, przy jednoczesnym zachowaniu pewności, że spełnione będą wymagania w zakresie zakłóceń elektromagnetycznych (EMI), rozmiarów i kosztów, eliminując niespodziewane sytuacje.
Wspomniane regulatory to coś znacznie więcej niż innowacyjne schematy i topologie. Oto niektóre z zastosowanych w nich technik:
- Technika nr 1: przełączanie regulatora działa jak oscylator/źródło o częstotliwościach radiowych (RF) i łączy się z przewodami połączeniowymi, które działają jak anteny. Na skutek tego zespół przekształca się w nadajnik radiowy emitujący niepożądaną energię, która może przekraczać dozwolone wartości graniczne (ilustracje 3, 4 i 5).
 Ilustracja 3: przewody łączące strukturę układu scalonego z obudową działają jak miniaturowe anteny i generują niepożądane promieniowanie o częstotliwościach radiowych (RF). (Źródło ilustracji: Analog Devices)
Ilustracja 3: przewody łączące strukturę układu scalonego z obudową działają jak miniaturowe anteny i generują niepożądane promieniowanie o częstotliwościach radiowych (RF). (Źródło ilustracji: Analog Devices)
 Ilustracja 4: montaż modułu Silent Switcher rozpoczyna się od zastąpienia połączeń przewodowych technologią flipchip, co eliminuje przewody wypromieniowujące energię. (Źródło ilustracji: Analog Devices)
Ilustracja 4: montaż modułu Silent Switcher rozpoczyna się od zastąpienia połączeń przewodowych technologią flipchip, co eliminuje przewody wypromieniowujące energię. (Źródło ilustracji: Analog Devices)
 Ilustracja 5: technologia flipchip skutecznie eliminuje anteny i zmniejsza energię promieniowaną. (Źródło ilustracji: Analog Devices)
Ilustracja 5: technologia flipchip skutecznie eliminuje anteny i zmniejsza energię promieniowaną. (Źródło ilustracji: Analog Devices)
- Technika nr 2: użycie symetrycznych kondensatorów wejściowych ogranicza zakłócenia elektromagnetyczne (EMI) poprzez generowanie zrównoważonych prądów przeciwstawnych (ilustracja 6).
 Ilustracja 6: aby ograniczyć zakłócenia elektromagnetyczne (EMI), dodaje się także lustrzaną parę kondensatorów wejściowych. (Źródło ilustracji: Analog Devices)
Ilustracja 6: aby ograniczyć zakłócenia elektromagnetyczne (EMI), dodaje się także lustrzaną parę kondensatorów wejściowych. (Źródło ilustracji: Analog Devices)
- Technika nr 3. Wreszcie, zastosowanie przeciwstawnych pętli prądowych do niwelacji pól magnetycznych (ilustracja 7).
 Ilustracja 7: układ wewnętrzny z pętlami prądowymi o przeciwnych kierunkach również niweluje niepożądane pola magnetyczne. (Źródło ilustracji: Analog Devices)
Ilustracja 7: układ wewnętrzny z pętlami prądowymi o przeciwnych kierunkach również niweluje niepożądane pola magnetyczne. (Źródło ilustracji: Analog Devices)
Opisywane moduły µModule Silent Switcher reprezentują ewolucję konstrukcji regulatora obniżającego i obudowy od układu scalonego z komponentami wspomagającymi do układu scalonego LQFN ze zintegrowanymi kondensatorami i dalej do modułu µModule z wymaganymi kondensatorami i cewkami indukcyjnymi (ilustracja 8).
 Ilustracja 8: dzięki umieszczeniu kondensatorów i cewki indukcyjnej wewnątrz obudowy, moduły µModules Silent Switcher stanowią trzeci etap rozwoju regulatorów przełączających na układach scalonych. (Źródło ilustracji: Analog Devices)
Ilustracja 8: dzięki umieszczeniu kondensatorów i cewki indukcyjnej wewnątrz obudowy, moduły µModules Silent Switcher stanowią trzeci etap rozwoju regulatorów przełączających na układach scalonych. (Źródło ilustracji: Analog Devices)
Szeroka oferta stanowi odpowiedź na potrzeby i kompromisy
Moduły µModule Silent Switcher to wiele odrębnych urządzeń o różnych parametrach znamionowych: zakresach napięć wejściowych, szyn napięcia wyjściowego i natężeń prądu wyjściowego. Na przykład urządzenie LTM8003 jest modułem µModule o napięciu od 3,4 do 40V na wejściu, 3,3V na wyjściu i o natężeniu prądu 3,5A w trybie ciągłym (szczytowo 6A), nie przekraczającym wartości granicznych podanych w normie CISPR 25, klasa 5, a jego wymiary to zaledwie 9 × 6,25mm przy 3,32mm wysokości (ilustracja 9).
") Ilustracja 9: moduł Silent Switcher LTM8003 posiada niewielką, niezależną obudowę, która z łatwością spełnia wymagania normy CISPR 25 klasy 5 w zakresie szczytowej wartości granicznej energii promieniowanej w zakresie od zera do 1000MHz. (Źródło ilustracji: Analog Devices)
Ilustracja 9: moduł Silent Switcher LTM8003 posiada niewielką, niezależną obudowę, która z łatwością spełnia wymagania normy CISPR 25 klasy 5 w zakresie szczytowej wartości granicznej energii promieniowanej w zakresie od zera do 1000MHz. (Źródło ilustracji: Analog Devices)
Jest oferowany w układzie wtyków zgodnym z analizą skutków usterki (FMEA) (LTM8003-3.3), co oznacza, że wyjście pozostaje na poziomie (lub poniżej) napięcia regulacyjnego podczas zwarcia styku sąsiedniego lub gdy styk pozostaje bez potencjału. Typowy prąd spoczynkowy wynosi tylko 25µA, a wersja klasy H jest przeznaczona do pracy w temperaturze 150°C.
W celu sprawdzenia i oceny regulatora oraz jego parametrów działania w konkretnym zastosowaniu, projektanci mogą użyć płytki demonstracyjnej DC2416A (ilustracja 10).
 Ilustracja 10: płytka demonstracyjna DC2416A upraszcza podłączanie i ocenę urządzenia Silent Switcher LTM8003. (Źródło ilustracji: Analog Devices)
Ilustracja 10: płytka demonstracyjna DC2416A upraszcza podłączanie i ocenę urządzenia Silent Switcher LTM8003. (Źródło ilustracji: Analog Devices)
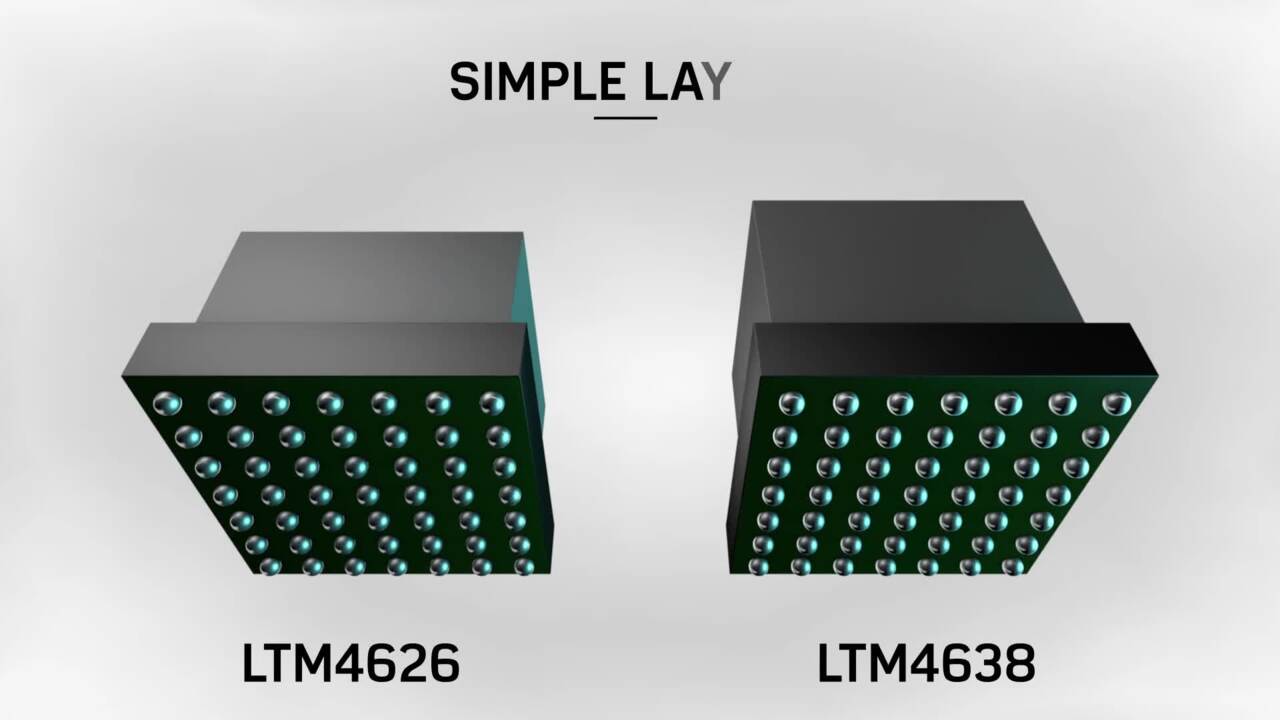
Dwa podobne do siebie pod względem parametrów znamionowych moduły µModule z grupy Silent Switcher, LTM4657 (wejście od 3,1 do 20V; wyjście od 0,5 do 5,5V przy 8A) i LTM4626 (wejście od 3,1 do 20V; wyjście od 0,6 do 5,5V przy 12A), ilustrują charakter kompromisów oferowanych przez omawiane urządzenia. W urządzeniu LTM4657 zastosowano cewkę indukcyjną o wyższej wartości niż w LTM4626. Umożliwia ona pracę przy niższych częstotliwościach w celu zmniejszenia strat przełączania.
Urządzenie LTM4657 to lepsze rozwiązanie w przypadku wysokich strat przełączania i niskich strat przewodzenia, np. w zastosowaniach, w których prąd obciążenia jest niski, a napięcie wejściowe jest wysokie. Patrząc na urządzenia LTM4626 i LTM4657 pracujące z tą samą częstotliwością przełączania oraz przy tym samym napięciu wejściowym 12V i wyjściowym 5V, wyższe straty przełączania można zauważyć w przypadku LTM4657 (ilustracja 11). Dodatkowo, cewka indukcyjna o wyższej wartości zmniejsza tętnienia napięcia wyjściowego. Jednak urządzenie LTM4626 może dostarczać prąd o większym natężeniu niż LTM4657.
 Ilustracja 11: porównanie sprawności urządzeń LTM4626 i LTM4657 przy częstotliwości 1,25MHz i tej samej konfiguracji na płytce demonstracyjnej DC2989A wykazuje niewielkie, choć wymierne różnice. (Źródło ilustracji: Analog Devices)
Ilustracja 11: porównanie sprawności urządzeń LTM4626 i LTM4657 przy częstotliwości 1,25MHz i tej samej konfiguracji na płytce demonstracyjnej DC2989A wykazuje niewielkie, choć wymierne różnice. (Źródło ilustracji: Analog Devices)
Użytkownicy mogą ocenić parametry działania urządzenia LTM4657 przy użyciu płytki demonstracyjnej DC2989A (ilustracja 12), natomiast dla tych, którzy chcą ocenić moduł LTM4626, dostępna jest płytka DC2665A-A (ilustracja 13).
 Ilustracja 12: płytka demonstracyjna DC2989A została zaprojektowana w celu przyspieszenia ewaluacji modułu Silent Switcher LTM4657. (Źródło ilustracji: Analog Devices)
Ilustracja 12: płytka demonstracyjna DC2989A została zaprojektowana w celu przyspieszenia ewaluacji modułu Silent Switcher LTM4657. (Źródło ilustracji: Analog Devices)
 Ilustracja 13: dla modułu Silent Switcher LTM4626 dostępna jest płytka demonstracyjna DC2665A-A ułatwiająca wykonywanie testów i ewaluację. (Źródło ilustracji: Analog Devices)
Ilustracja 13: dla modułu Silent Switcher LTM4626 dostępna jest płytka demonstracyjna DC2665A-A ułatwiająca wykonywanie testów i ewaluację. (Źródło ilustracji: Analog Devices)
Urządzenia µModule Silent Switcher to nie tylko moduły o jednym wyjściu. Na przykład urządzenie LTM4628 jest kompletnym regulatorem przełączającym prądu stałego z dwoma wyjściami 8A, który można łatwo skonfigurować tak, aby zapewniał jedno wyjście 2-fazowe 16A (ilustracja 14). Moduł ten jest dostępny w obudowach BGA 15mm × 15mm × 4,32mm oraz 15mm × 15mm × 4,92mm. Zawiera on sterownik przełączania, tranzystory mocy FET, cewkę indukcyjną i wszystkie komponenty pomocnicze.
") Ilustracja 14: urządzenie LTM4628 można skonfigurować jako regulator przełączający prądu stałego z dwoma wyjściami 8A na kanał lub jako regulator z jednym wyjściem 16A. (Źródło ilustracji: Analog Devices)
Ilustracja 14: urządzenie LTM4628 można skonfigurować jako regulator przełączający prądu stałego z dwoma wyjściami 8A na kanał lub jako regulator z jednym wyjściem 16A. (Źródło ilustracji: Analog Devices)
Moduł działa w zakresie napięć wejściowych od 4,5 do 26,5V i obsługuje zakres napięć wyjściowych od 0,6 do 5,5V, który ustawiany jest pojedynczym rezystorem zewnętrznym. Użytkownicy mogą sprawdzić parametry działania urządzenia w konfiguracji jedno i dwuwyjściowej za pomocą płytki demonstracyjnej DC1663A (ilustracja 15).
 Ilustracja 15: ewaluację jedno- i dwuwyjściowego urządzenia LTM4628 można przyspieszyć dzięki użyciu płytki demonstracyjnej DC1663A. (Źródło ilustracji: Analog Devices)
Ilustracja 15: ewaluację jedno- i dwuwyjściowego urządzenia LTM4628 można przyspieszyć dzięki użyciu płytki demonstracyjnej DC1663A. (Źródło ilustracji: Analog Devices)
Podsumowanie
Zaprojektowanie działającego regulatora prądu stałego jest dość łatwe dzięki dostępnym układom scalonym. Jednak zaprojektowanie regulatora, który jednocześnie wyróżnia się sprawnością, jest funkcjonalnie kompletny i spełnia często różne, mylące i rygorystyczne wymagania przepisów już takie nie jest. Moduły µModules Silent Switcher firmy Analog Devices upraszczają proces projektowania. Eliminują ryzyko, realizując cele w zakresie niskiej temperatury i sprawnej pracy, emisji zakłóceń elektromagnetycznych (EMI) poniżej dozwolonych limitów oraz kompletności.
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.