W jaki sposób małe i średnie firmy mogą wykorzystać przemysłowy metawers do szybkiej eksploracji i wdrażania rozwiązań robotycznych
Przekazane przez: Północnoamerykańscy redaktorzy DigiKey
2024-11-21
Roboty i roboty współpracujące (koboty) należą do najnowocześniejszych technologii automatyki przemysłowej. Cyfrowe bliźniaki i rzeczywistość wirtualna (VR) należą do najnowocześniejszych technologii, jeśli chodzi o narzędzia projektowe i rozwojowe. Ich połączenie można wykorzystać do stworzenia przemysłowego metawersu, który pozwala szybciej zapewnić wyższą wydajność, nawet w przypadku małych i średnich przedsiębiorstw (MŚP).
Projektanci w małych i średnich firmach mogą skorzystać na użyciu prostego i intuicyjnego interfejsu, który łączy w sobie cyfrowego bliźniaka, bardzo szczegółowy wirtualny model obiektu fizycznego, takiego jak robot delta, liniowy lub wieloosiowy, oraz 3-wymiarowe (3D) środowisko rzeczywistości wirtualnej (VR), aby umożliwić bezpośrednie wykonywanie i sprawdzanie sekwencji ruchów robota.
Korzystanie z tych funkcji pozwala na precyzyjne dostrajanie i optymalizację systemu automatyki nawet bez fizycznego sprzętu oraz umożliwia szybką analizę wielu potencjalnych rozwiązań.
W niniejszym artykule omówiono w pierwszej kolejności różnicę między matematycznym cyfrowym bliźniakiem opartym na danych a wizualnym bliźniakiem cyfrowym (bliźniak oparty na rzeczywistości wirtualnej) oraz dlaczego oba są potrzebne do stworzenia przemysłowego metawersu. Następnie przedstawiono system sterowania robotem i powiązane oprogramowanie firmy Igus, które można wykorzystać do symulacji robota w interfejsie 3D (wizualny bliźniak cyfrowy) bez użycia fizycznego sprzętu, wraz z kompatybilnymi robotami delta, liniowymi i wieloosiowymi, które można wykorzystać do realizacji zoptymalizowanego rozwiązania.
Cyfrowe bliźniaki i rzeczywistość wirtualna (VR) to komplementarne technologie wykorzystujące różne formy wizualizacji, interakcje i sprzęt. Cyfrowe bliźniaki są opartymi na danych modelami obiektów fizycznych, systemów lub procesów. Są one przeznaczone do użytku przez cały cykl życia modelowanego elementu, od początkowej koncepcji do wycofania z eksploatacji i recyklingu.
Rzeczywistość wirtualna (VR) to immersyjna technologia wizualna, która wykorzystuje również modele cyfrowe. W środowisku rzeczywistości wirtualnej (VR) można symulować relacje i interakcje między obiektami, na przykład robotem wykonującym zadanie. Tak więc, podczas gdy obie technologie mogą być wykorzystywane do projektowania i symulacji, technologia cyfrowych bliźniaków koncentruje się na ogólnych zagadnieniach związanych z cyklem życia, a rzeczywistość wirtualna (VR) koncentruje się na interakcjach między obiektami fizycznymi.
Metawers łączy w sobie cyfrowe bliźniaki i rzeczywistość wirtualną (VR), tworząc specjalnie zbudowane środowisko wirtualne, które obsługuje interakcje w czasie rzeczywistym między obiektami cyfrowymi a ludźmi. Często jest kojarzony z grami, ale coraz częściej stosuje się go w działalności biznesowej i przemysłowej.
Witamy w świecie iguverse
Firma Igus opracowała metawers iguverse, aby wspierać interakcje inżynieryjne w środowiskach przemysłowych, takie jak opracowywanie i wdrażanie systemów robotycznych. Środowisko iguverse może być wdrożone za pomocą oprogramowania Igus Robot Control (iRC). Ta bezpłatna i bezlicencyjna aplikacja umożliwia użytkownikom sterowanie różnymi typami robotów, na przykład robotami delta, kobotami (ramionami robotów) i robotami bramowymi.
Udostępnia ona użytkownikom interfejs 3D i ponad 100 przykładowych programów. Wymagania systemowe niezbędne do wdrożenia technologii iRC obejmują komputer PC (procesor co najmniej Intel i5) z systemem Windows 10 lub 11 (64-bitowym), 500MB wolnego miejsca na dysku oraz łączność sieciową Ethernet lub bezprzewodową.
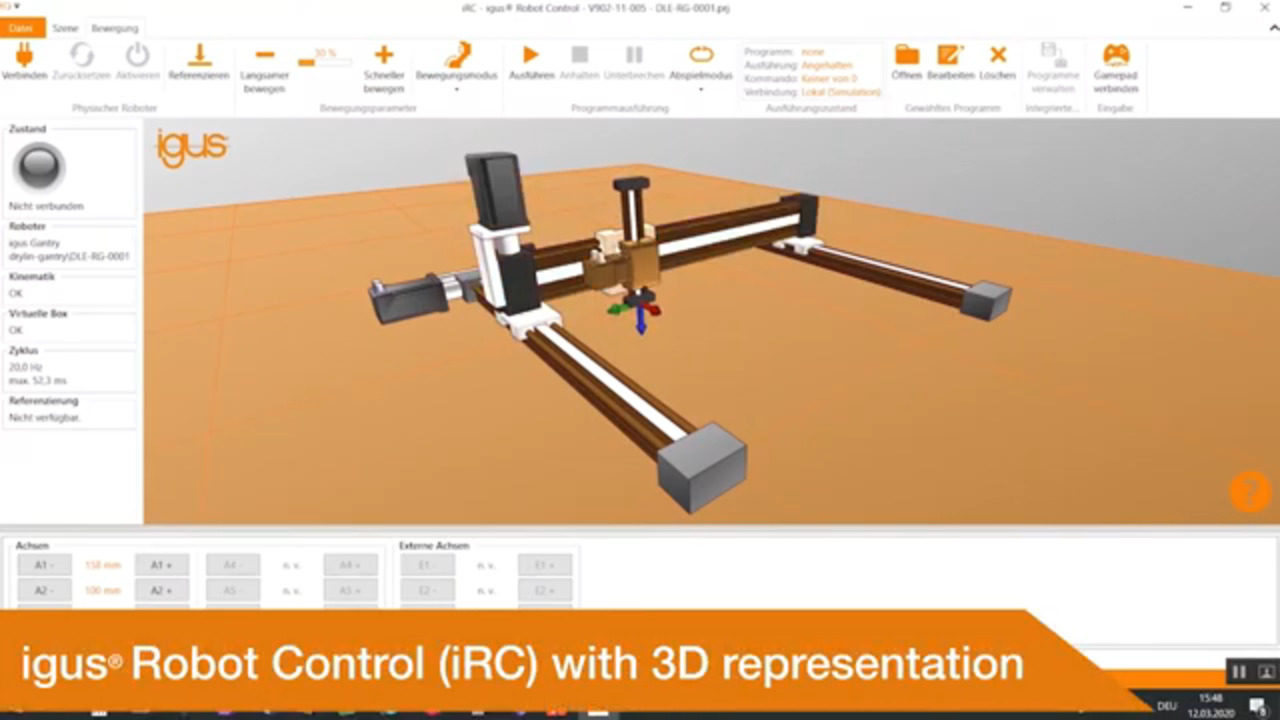
Rdzeniem oprogramowania jest cyfrowy bliźniak 3D programowanego robota. Przykładem może być trójosiowy liniowy robot bramowy, taki jak model DLE-RG-0001-AC-500-500-100 z obszarem roboczym 500 x 500 x 100mm lub dwuosiowy aktuator xy, taki jak model DLE-LG-0012-AC-800-500 z obszarem roboczym 800 x 500mm (ilustracja 1). Projektanci mogą zdefiniować ruchy za pomocą kilku kliknięć myszą i wykorzystać model 3D, aby upewnić się, że wymagane ruchy są wykonalne, jeszcze przed zakupem robota.
 Ilustracja 1: przykład cyfrowego bliźniaka 3D trójosiowego robota bramowego w rzeczywistości wirtualnej (VR) środowiska iguverse. (Źródło ilustracji: Igus)
Ilustracja 1: przykład cyfrowego bliźniaka 3D trójosiowego robota bramowego w rzeczywistości wirtualnej (VR) środowiska iguverse. (Źródło ilustracji: Igus)
Kluczowym elementem środowiska rozwojowego iguverse oprócz oprogramowania iRC jest kontroler robota. Na przykład model IRC-LG12-02000 przeznaczony jest do silników 48V, posiada siedem wejść i siedem wyjść oraz kabel o długości 10m do połączenia z robotem. Kontrolery IRC zawierają moduły napędów silnikowych do bipolarnych silników krokowych różnej wielkości i są dostępne jako modele konfigurowalne lub wstępnie skonfigurowane. Posiadają również kilka interfejsów do integracji systemu, w tym:
- Interfejs programowanego sterownika logicznego (PLC) do sterowania za pośrednictwem wejść i wyjść cyfrowych, zapewniający łatwe uruchamianie i zatrzymywanie programów za pomocą programowanego sterownika PLC lub przycisku
- Interfejs Modbus TCP do sterowania za pośrednictwem sterownika PLC lub komputera PC
- Interfejs Ethernet typu Common Robotic Interface (CRI) do sterowania i konfiguracji za pomocą sterownika PLC lub komputera PC
- Interfejs systemu operacyjnego robota (ROS) do obsługi robota za pomocą systemu operacyjnego ROS
- Interfejs dla kamer wykrywania obiektów
- Interfejs chmurowy do zdalnego monitorowania stanu robota
Obsługiwana kinematyka
Środowisko iguverse obsługuje różne rodzaje kinematyki (ruchów podstawowych), które definiują kontrolowany ruch robota. Oprócz wstępnie skonfigurowanej kinematyki, w oprogramowaniu IRC można skonfigurować maksymalnie trzy dodatkowe niezależne kinematycznie osie. Wstępnie skonfigurowana kinematyka obejmuje:
- 2-osiowe i 3-osiowe roboty delta
- roboty bramowe,
- 2-osiowe (oś X i Y)
- 2-osiowe (oś Y i Z)
- 3-osiowe (oś X, Y i Z)
- Ramiona robotyczne (koboty),
- 3-osiowe (oś 1, 2, 3)
- 3-osiowe (oś 2, 3, 4)
- 4-osiowe (oś 1, 2, 3, 4)
- 4-osiowe (oś 2, 3, 4, 5)
- 5-osiowe (osie od 1 do 5)
- 6-osiowe (osie od 1 do 6)
- 4-osiowe montażowe ramiona robotyczne o selektywnej zgodności (SACRA)
Łatwość programowania zapewniająca ekonomiczną automatykę
Roboty Igus oraz kontroler IRC zostały zaprojektowane z myślą o niskokosztowej automatyce. Nie byłoby to możliwe bez łatwego w użyciu interfejsu programowania. W środowisku iguverse robotem można poruszać i sterować za pomocą 3-przyciskowej myszy lub kontrolera do gier. Dzięki oprogramowaniu IRC użytkownik może swobodnie poruszać wszystkimi osiami cyfrowego bliźniaka w interfejsie 3D. Funkcja uczenia ułatwia tworzenie oprogramowania sterującego robotem, nawet bez fizycznego podłączenia robota.
Aby wdrożyć proces uczenia, użytkownik ręcznie ustawia robota wirtualnego w wymaganej pozycji i definiuje sposób, w jaki się tam porusza. Proces jest powtarzany do momentu utworzenia pełnego profilu ruchu. Centrum narzędziowe w oprogramowaniu IRC pozwala użytkownikom na dodawanie pasujących efektorów końcowych, takich jak chwytaki, oraz łatwą i automatyczną korekcję środka narzędzia w robocie. Ponadto istnieje możliwość połączenia z nadrzędnym przemysłowym systemem sterowania.
Proces rozpoczyna się od aktywacji robota za pomocą przycisków „connect” (połącz), „reset” (resetuj) i „enable” (włącz) w zależności od potrzeb w interfejsie. Dioda LED statusu IRC powinna świecić kolorem zielonym, a sam status powinien wskazywać „No Error” (Brak błędu). Na karcie „Jogging” (Praca impulsowa) można następnie wprowadzić profil ruchu (ilustracja 2).
 in the iguverse immersive development environment (click to enlarge)") Ilustracja 2: do wprowadzania profili ruchu można użyć karty „Jogging” (Praca impulsowa) (na dole po lewej) w immersyjnym środowisku rozwojowym iguverse. (Źródło ilustracji: Igus)
Ilustracja 2: do wprowadzania profili ruchu można użyć karty „Jogging” (Praca impulsowa) (na dole po lewej) w immersyjnym środowisku rozwojowym iguverse. (Źródło ilustracji: Igus)
Roboty bramowe
Roboty bramowe, takie jak te zawarte w poprzednich przykładach środowiska iguverse, posiadają dwie podstawowe osie, oś X i oś Y, oraz opcjonalną oś Z. Oś Y jest połączona z dwiema równoległymi osiami X i ruch po niej odbywa się tam i z powrotem w przestrzeni dwuwymiarowej. Opcjonalna oś Z obsługuje ruch w trzecim wymiarze.
Roboty bramowe firmy Igus posiadają samosmarujące okładziny z tworzywa sztucznego, które zapewniają płynniejszy i cichszy ślizg i obrót wokół osi poziomej wzdłużnej w porównaniu z tradycyjnymi konstrukcjami opartymi na łożyskach kulkowych. Nowa konstrukcja jest lżejsza, odporna na korozję i nie wymaga konserwacji, co ma duże znaczenie dla małych i średnich przedsiębiorstw (MŚP). Równie ważne dla małych i średnich przedsiębiorstw (MŚP) jest to, że omawiane roboty kosztują nawet o 40% mniej niż tradycyjne roboty bramowe, co zapewnia szybszy zwrot z inwestycji (ROI).
Roboty te są przeznaczone do dwóch klas zastosowań: niskich prędkości przy wysokich obciążeniach oraz wysokich prędkości przy niskich obciążeniach. Ich typowe zastosowania to m.in. pakowanie, montaż maszynowy, etykietowanie, transport bliski materiałów i montaż.
Są one oferowane w różnych rozmiarach. Dostępne akcesoria obejmują złącza, efektory końcowe i kołnierze silników. Przykłady średnich robotów bramowych:
- DLE-FG-0006-AC-650-650 to dwuwymiarowa płaska brama o przestrzeni roboczej 650 x 650mm. Robot ten może przenosić ładunki o masie do 8kg, a jego szybkość dynamiczna wynosi do 20 pobrań na minutę.
- DLE-RG-0012-AC-800-800-500 to trójwymiarowa brama o przestrzeni roboczej 800 x 800 x 500mm. Może obsługiwać obciążenia do 10kg przy dynamicznej prędkości do 20 pobrań na minutę.
Wydajność paletyzacji
Paletyzacja produktów przeznaczonych do wysyłki jest codziennością w produkcji i logistyce. Najnowszym i największym elementem środowiska iguverse jest duży robot bramowy XXL o przestrzeni roboczej 2000 x 2000 x 1500mm, dobrze przystosowany do paletyzacji elementów o masie do 10kg. Dostępny jest w niestandardowych konstrukcjach o przestrzeniach roboczych do 6000 x 6000 x 1500mm.
Wspomniane roboty bramowe mogą podnosić części o wadze do 10kg, transportować je z prędkością do 500mm/s i umieszczać na palecie z powtarzalnością 0,8mm (ilustracja 3). Roboty paletyzujące firmy Igus są tańsze nawet o 60% w odniesieniu do porównywalnych systemów.
 Ilustracja 3: paletyzacja jest powszechną i ważną czynnością w operacjach produkcyjnych i logistycznych. Można ją zautomatyzować za pomocą robota bramowego. (Źródło ilustracji: Igus)
Ilustracja 3: paletyzacja jest powszechną i ważną czynnością w operacjach produkcyjnych i logistycznych. Można ją zautomatyzować za pomocą robota bramowego. (Źródło ilustracji: Igus)
Roboty delta
Podobnie jak roboty bramowe, roboty delta są dostępne z dwiema lub trzema osiami. Roboty delta posiadają obszar roboczy w kształcie kopuły nad przestrzenią roboczą. Charakteryzują się one wyjątkowo wysokimi prędkościami i są często używane do transportu bliskiego materiałów oraz rozmieszczania części. Przykłady robotów delta firmy Igus:
- RBTX-IGUS-0047 to konstrukcja trójosiowa z przestrzenią roboczą o średnicy 660mm. Charakteryzuje się dokładnością ±0,5mm, maksymalnym ciężarem ładunku 5kg, maksymalną prędkością 0,7m/s i może wykonywać maksymalnie 30 cykli pobierania na minutę. (Ilustracja 4).
- RBTX-IGUS-0059 to konstrukcja 2-osiowa z przestrzenią roboczą o średnicy 700mm. Również charakteryzuje się dokładnością ±0,5mm. Jej maksymalny ciężar ładunku wynosi 5kg, a prędkość maksymalna to 2m/s. Może wykonywać do 50 cykli pobrań na minutę.
 Ilustracja 4: przykład trójosiowego robota delta obok kontrolera iRC firmy Igus (po lewej). (Źródło ilustracji: DigiKey)
Ilustracja 4: przykład trójosiowego robota delta obok kontrolera iRC firmy Igus (po lewej). (Źródło ilustracji: DigiKey)
Koboty z ramionami przegubowymi
Środowisko iguverse obsługuje również koboty z ramionami przegubowymi. Koboty mogą mieć od dwóch do 10 lub więcej osi, zwanych również stopniami swobody (DOF). Zwykle mają duże przestrzenie robocze i mogą wykonywać złożone zadania we współpracy z człowiekiem. Model REBEL-6DOF-02 firmy Igus ma 6 stopni swobody, a model REBEL-4DOF-02 posiada ich 4. Obydwa urządzenia charakteryzują się dokładnością ±1mm, nominalnym zakresem roboczym 400mm i mogą wykonywać co najmniej 7 pobrań na minutę przy prędkości liniowej 200mm/s.
Dla modelu z 6 stopniami swobody (DOF) maksymalny ciężar ładunku wynosi 2kg, a maksymalny zasięg 664mm. Dla modelu z 4 stopniami swobody (DOF) maksymalny ciężar ładunku wynosi 3kg, a maksymalny zasięg 495mm (ilustracja 5).
 and 6 DOF (right)") Ilustracja 5: koboty z ramionami przegubowymi z 4 stopniami swobody (DOF) (po lewej) i 6 stopniami swobody (DOF) (po prawej). (Źródło ilustracji: Igus)
Ilustracja 5: koboty z ramionami przegubowymi z 4 stopniami swobody (DOF) (po lewej) i 6 stopniami swobody (DOF) (po prawej). (Źródło ilustracji: Igus)
Podsumowanie
Immersyjny przemysłowy metawers iguverse łączy w sobie cyfrowe bliźniaki i rzeczywistość wirtualną (VR), zapewniając narzędzia, które umożliwiają szybkie opracowywanie i wdrażanie rozwiązań robotycznych. Jest on bezpłatny, nielicencjonowany i przeznaczony do uruchamiania lokalnie na komputerze bez połączenia z chmurą. Można go używać do opracowywania i testowania rozwiązań robotycznych bez obecności robota.
Obsługuje on szeroki zakres kinematyki w robotach delta, robotach bramowych, ramionach robotycznych (kobotach) oraz montażowych ramionach robotycznych o selektywnej zgodności (SACRA). Kontroler IRC posiada szereg interfejsów obsługujących automatykę i potrzeby operacyjne, w tym interfejs PLC, Modbus TCP/IP, CRI Ethernet, interfejs ROS, interfejs dla kamer wykrywania obiektów oraz interfejs chmurowy. Środowisko iguverse, kontroler iRC i powiązane z nimi roboty firmy Igus zostały zoptymalizowane pod kątem potrzeb w kontekście niedrogiej automatyki dla małych i średnich przedsiębiorstw (MŚP).
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.